[1]Изобретение относится к весодози- ровочной технике и может быть использовано
в технических средствах дозирования сыпучих материалов.
[2]Цель изобретения - повьппение точности дозирования.
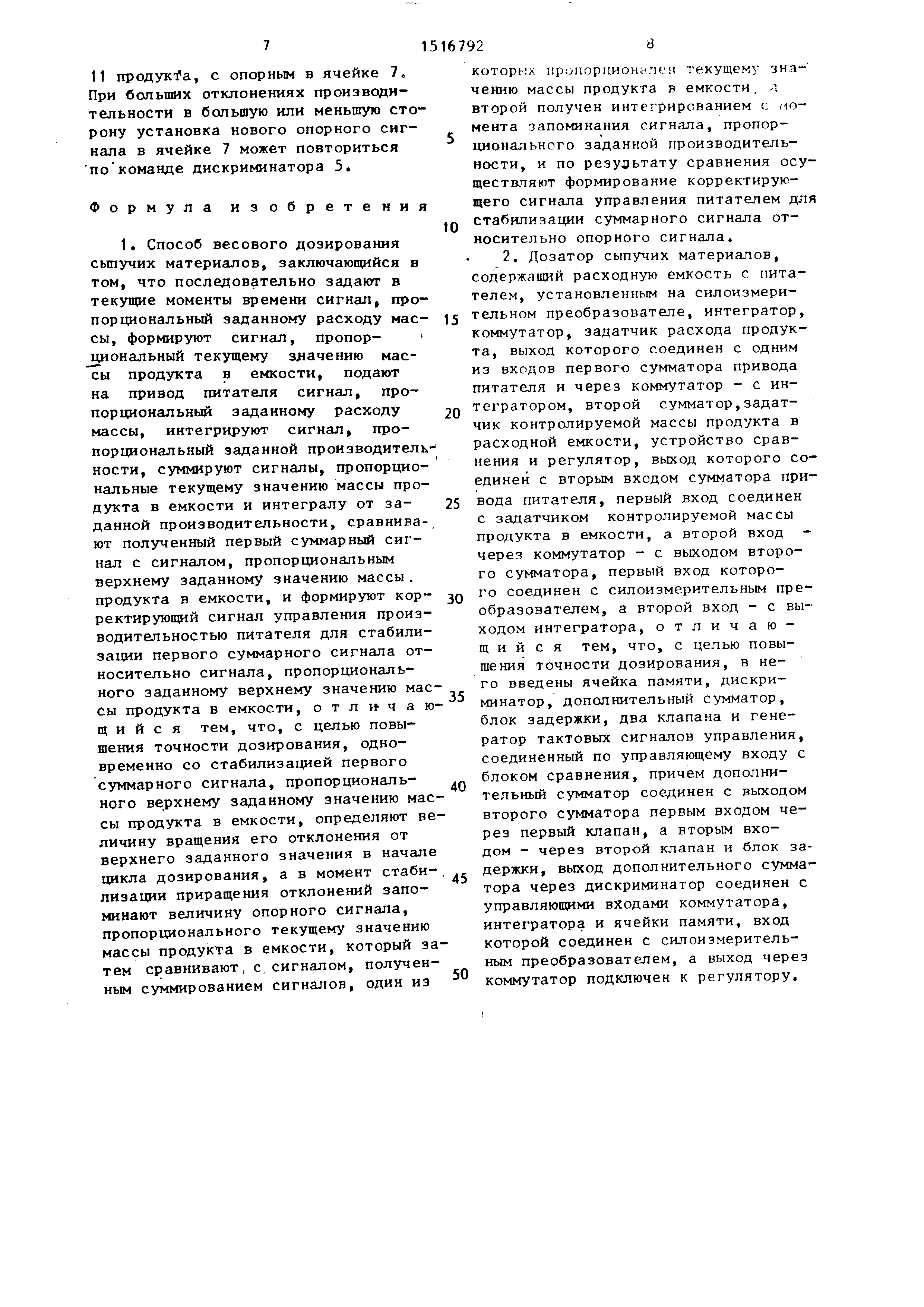
[3]На фиг.1 и 2 показаны графики изменения
массы продукта в емкости, иллюстрирующие способ весового дозирования; на фиг.З - схема дозатора
.
[4]Существо способа заключается в следующем.
[5]На фиг.1 приведен график процес- jca изменения массы продукта в емкости (кривая А) и cyMMaJjHoro сигнала
(кривая В), образованного сложением интегральной величины от заданной
производительности и массы продукта в емкости.
[6]Производительность дэзатора в начале
цикла не соответствует заданной величине расхода (как правило ниже), что приводит по мере выхода
продукта из бункера к накоплению интегральной ошибки по массе выгруженного
продукта.Система регулирования дозатора изменяет производительность питателя в сторону уменьшения этой
ошибки таким образом, что через определенный интервал времени сумма интегральной величины от заданного
расхода Gp и текущего значения массы сравняются (точка а,) . Однако в момент выравнивания масс
(точка U, ) производительность питателя будет выше заданной, что приводит
к накоплению интегральной ошибки 4 G (другого знака). Таким образом , процесс выравнивания масс
[8]порождает процесс дестабилизации призводительности
питателя и приводит к увеличению погрешности дозирования .
[9]Другими словами, для того, чтобы уравнять сумму и Gp с величиной
Од, необходимо увеличить производительность питателя, причем чем вы- ще, тем больше отклонение заданной
и фактической производительности.
[10]На фиг,2 приведен график изменения
массы продукта в емкости с коррекцией уровня опорного сигнала GO. В начале процесса (на участке d-e)
изменения производительности питате0
[20]ля при выравнивании суммарного сигнала
Ср + G относительно G одновременно осуществляется измерение приращения отклонений лС через
установленные интервалы времени (время опроса).
[21]Как только величина приращений
aG снижается до установленного порога (0,1%), что соответствует равенству фактической производительности
заданной величине, в ячейке памяти запоминают величину сигнала, пропорционального массе продукта в
емкости и далее процесс стабилиза- .ции производительности питателя осуществляют
сравнением суммарного сигнала GP + G с G,.
[22]Таким образом, процесс управления
и стабилизации производительности питателя осуществляется не только
путем сравнения суммы выгруженного и оставшегося в емкости продукта с
начальной (контролируемой) массой загрузки, но и путем выбора нового
опорного сигнала, пропорционального массе продукта в емкости в момент
выравнивания фактической производительности дозатора ее заданной величине . Далее процесс управления
производительностью питателя при малых отклонениях л G осуществляется известным способом.
[23]Введение операции выбора опорного сигнала позволяет сократить время
выхода на требуемый режим производительности , обеспечить устойчивый процесс дозирования и тем самым
повысить его точность.
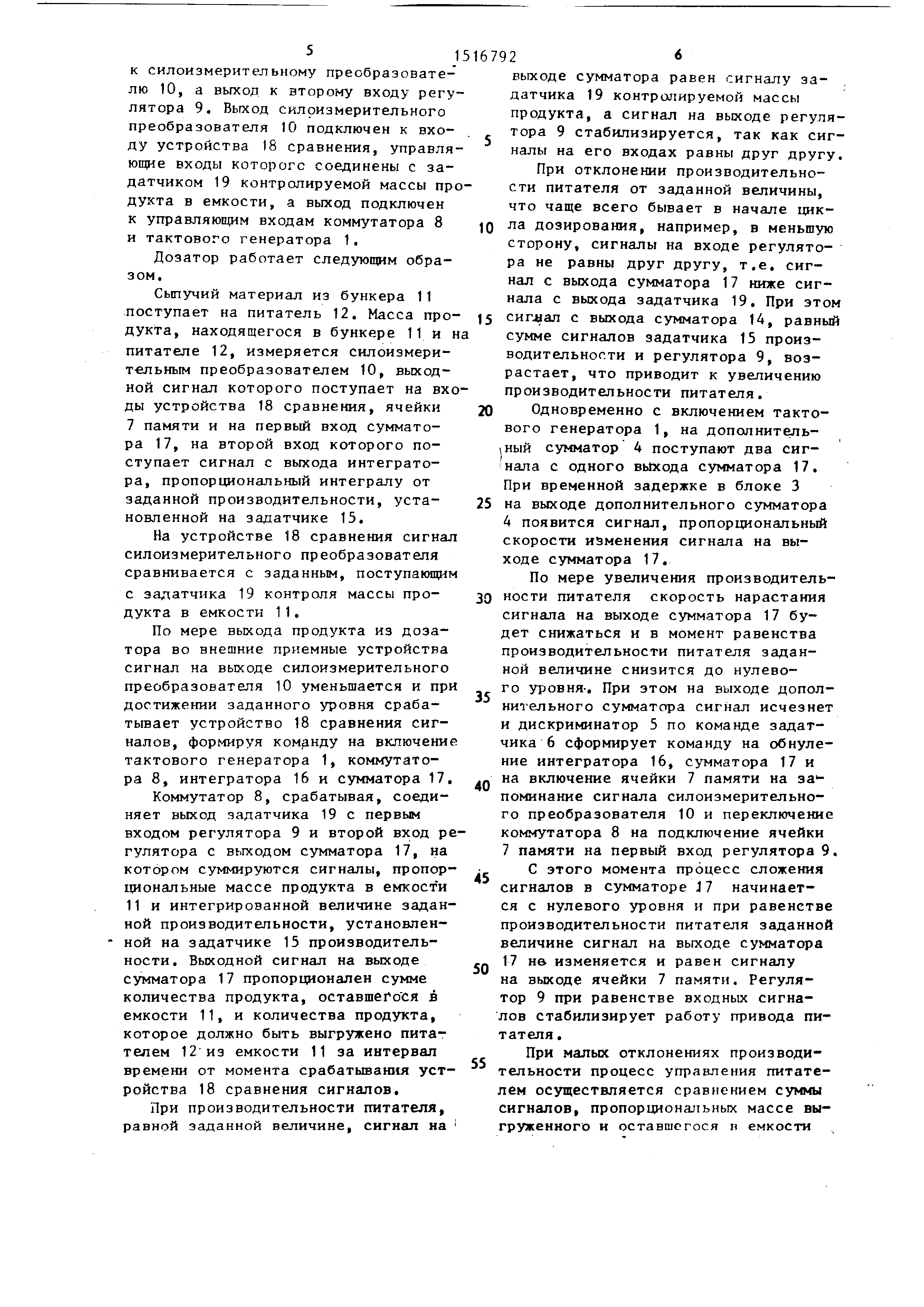
[24]Дозатор сьшучих материалов (фиг.З)
имеет тактовый генератор 1, клапаны 2, блок 3 задержки сигнала, дополнительный
, сумматор 4, дискриминатор 5 с задатчиком 6 уровня, ячейку 7 памяти, выход которой через
коммутатор 8 соединен с первым входом регулятора 9, информационный вход ячейки 7 соединен с Силоизме-
рительным преобразователем -10, на который установлен расходный бункер
11, питатель 12, оснащенный приводом 13, управление которым осуществляется от сумматора 14, первый
вход которого соединен с выходом регулятора 9, а второй с задатчиком
15 производительности, сигнал которого одновременно поступает через интегратор
16 на первый вход сумматора 17, второй вход которого подключен
[25]к силоизмернтельному преобразователю 10, а выход к второму входу регулятора 9. Выход силризмерительного
преобразователя 10 подключен к входу устройства 18 сравнения, управляющие входы которогс соединены с за-
датчиком 19 контролируемой массы продукта в емкости, а выход подключен к управляющим входам коммутатора 8
и тактового генератора 1,
[26]Дозатор работает следующим образом .
[27]Сыпучий материал из бункера 11 поступает на питатель 12. Масса продукта , находящегося в бункере 11 и н
питателе 12, измеряется силоизмери- т-ельным преобразователем 10, выходной
сигнал которого поступает на входы устройства 18 сравнения, ячейки 7 памяти и на первый вход сумматора
17, на второй вход которого поступает сигнал с выхода интегратора , пропорциональный интегралу от
заданной производительности, установленной на задатчике 15.
[28]На устройстве 18 сравнения сигнал силоизмерительного преобразователя
сравнивается с заданным, поступающим с задатчика 19 контроля массы продукта в емкости 11.
[29]По мере выхода продукта из дозатора во внешние приемные устройства
сигнал на выходе силоизмерительного преобразователя 10 уменьшается и при
достижении заданного уровня сраба- тьшает устройство 18 сравнения сигналов
, формируя команду на включение тактового генератора 1, коммутатора 8, интегратора 16 и сумматора 17.
[30]Коммутатор 8, срабатывая, соединяет выход задатчика 19 с первым
входом регулятора 9 и второй вход регулятора с выходом сумматора 17, на
котором суммируются сигналы, пропорциональные массе продукта в емкост и
11 и интегрированной величине заданной производительности, установленной
на задатчике 15 производительности . Выходной сигнал на выходе сумматора 17 пропорционален сумме
количества продукта, оставшегося в емкости 11, и количества продукта,
которое должно быть выгружено питателем 12 из емкости 11 за интервал
времени от момента срабатывания устройства 18 сравнения сигналов.
[31]При производительности питателя, равной заданной величине, сигнал на
[35]выходе сумматора равен сигналу задатчика 19 KOHTpoJTHpyeMoA массы
продукта, а сигнал на выходе регулятора 9 стабилизируется, так как сигналы
на его входах равны друг другу.
[36]При отклонении производительности
питателя от заданной величины, что чаще всего бывает в начале цикла дозирования, например, в меньшую
сторону, сигналы на входе регулятора не равны друг другу, т.е. сигнал с выхода сумматора 17 ниже сигнала
с выхода задатчика 19. При этом 5 сигнал с выхода сумматора 14, равный
сумме сигналов задатчика 15 производительности и регулятора 9, возрастает , что приводит к увеличению
производительности питателя.
[37]Одновременно с включением тактового
генератора 1, на допопнитель- 1НЫЙ сумматор 4 поступают два сигнала с одного вь1хода сумматора 17.
При временной задержке в блоке 3 на выходе дополнительного сумматора
4 появится сигнал, пропорциональный скорости изменения сигнала на выходе сумматора 17.
[38]По мере увеличения производительности питателя скорость нарастания
сигнала на выходе сумматора 17 будет снижаться и в момент равенства
производительности питателя заданной величине снизится до нулевого
уровня-. При зтом на выходе дополнительного сумматора сигнал исчезнет
и дискриминатор 5 по команде задатчика 6 сформирует команду на обнуление
интегратора 16, сумматора 17 и на включение ячейки 7 памяти на поминание сигнала силоизмерительного
преобразователя 10 и переключение коммутатора 8 на подключение ячейки
7 памяти на первый вход регулятора 9.
[39]С этого момента процесс сложения
сигналов в сумматоре J7 начинается с нулевого уровня и при равенстве
производительности питателя заданной величине сигнал на выходе сумматора
17 не изменяется и равен сигналу на выходе ячейки 7 памяти. Регулятор
9 при равенстве входных сигналов стабилизирует работу привода питателя .
[40]При мальк отклонениях производительности процесс управления питателем осуществляется сравнением суммы
сигналов, пропорциональных массе выгруженного и оставшегося п емкости
[47]11 продукта, с опорным в ячейке 7. При больших отклонениях производительности в большую или меньшую сторону
установка нового опорного сигнала в ячейке 7 может повториться по команде дискриминатора 5.
[49]1. Способ весового дозирования сьтучих материалов, заключающийся в
том, что последовательно задают в текущие моменты времени сигнал, пропорциональный заданному расходу массы
, формируют сигнал, пропор- i щ1ональный текущему злачению массы продукта в емкости, подают
на привод питателя сигнал, пропорциональный заданному расходу
массы, интегрируют сигнал, пропорциональный заданной производитель
ности, суммируют сигналы, пропорциональные текущему значению массы продукта
в емкости и интегралу от заданной производительности, сравнивают полученный первый суммарный сигнал
с сигналом, пропорциональным верхнему заданному значению массы .
продукта в емкости, и формируют корректирующий сигнал управления производительностью
питателя для стабилизации первого суммарного сигнала относительно сигнала, пропорционального
заданному верхнему значению массы продукта в емкости, отличающийся тем, что, с целью повышения
точности дозирования, одновременно со стабилизацией первого суммарного сигнала, пропорционального
верхнему заданному значению массы продукта в емкости, определяют величину вращения его отклонения от
верхнего заданного значения в начале цикла дозирования, а в момент стабилизации
приращения отклонений запоминают величину опорного сигнала, пропорционального текущему значению
массы продукта в емкости, который затем сравнивают, с. сигналом, полученным
суммированием сигналов, один из
[50]которых npouopiLHOHtijifjH текущему зна-
чению массы продукта в емкости, л второй получен интегрированием с; ио-
мента запоминания сигнала, пропорционального заданной производительности
, и по результату сравнения осуществляют формирование корректирующего сигнала управления питателем для
Q стабилизации суммарного сигнала относительно опорного сигнала.
[51]2, Дозатор сыпучих материалов, содержащий расходную емкость с питателем , установленным на силоизмери-
5 тельном преобразователе, интегратор, коммутатор, задатчик расхода продукта
, выход которого соединен с одним из входов первого сумматора привода
питателя и через коммутатор - с ин- Q тегратором, второй сумматор,задатчик
контролируемой массы продукта в расходной емкости, устройство сравнения
и регулятор, выход которого соединен с вторым входом сумматора при-
5 вода питателя, первый вход соединен с задатчиком контролируемой массы
продукта в емкости, а второй вход через коммутатор - с выходом второго сумматора, первый вход которо-
Q го соединен с силоизмерительным преобразователем , а второй вход - с выходом
интегратора, отличающийся тем, что, с целью повышения точности дозирования, в него
введены ячейка памяти, дискри5
[52]минатор, дополнительный сумматор.
[54]блок задержки, два клапана и генератор тактовых сигналов управления,
соединенный по управляющему входу с блоком сравнения, причем дополни-
тельньш сумматор соединен с выходом второго сумматора первым входом через
первый клапан, а вторым входом - через второй клапан и блок задержки
, выход дополнительного сумматора через дискриминатор соединен с управляющими входами коммутатора,
интегратора и ячейки памяти, вход которой соединен с силоизмерительным
преобразователем, а выход через
[56]коммутатор подключен к регулятору.