[2]Изобретение относится к области электротехники и может быть использовано в летательных аппаратах с установленным на них винтом спереди или сзади, подводных аппаратах и прочих областях применения техники, где большое внимание уделяется лобовому сопротивлению, а также в судо- и машиностроении.
[4]Из уровня техники известен мотор-генератор с магнитными концентраторами, содержащий статор с двумя кольцеобразными магнитопроводами, на которых расположены по окружности постоянные магниты с чередующейся полярностью и магнитопроводные пластины (концентраторы), и внешний ротор, на котором закреплены электромагниты, соединенные через токосъемники с распределительным коллектором, отличающийся тем, что каждый магнитопровод содержит одинаковое четное число постоянных магнитов каждой полярности и концентраторов, установленных всех с одинаковым шагом, причем две пары постоянных магнитов разной полярности разделены одним концентратором таким образом, что к концентратору с обеих сторон прилегают одноименные постоянные магниты, в поперечном направлении полярность магнитов разных магнитопроводов чередуется, а напротив концентраторов одного магнитопровода лежат концентраторы другого магнитопровода; электромагниты являются поперечными подковообразными, расположены напротив друг друга и имеют по две катушки с последовательно встречным направлением обмотки, при этом каждая из катушек электромагнитов расположена над одним из магнитопроводов; распределительный коллектор содержит одинаковое четное число чередующихся положительных, отрицательных ламелей и возвратных ламелей, которые имеют возможность соединения через выпрямитель с источником тока, число ламелей каждого типа равно числу концентраторов. (см. RU 2708635 от 02.07.2019г).
[5]Недостатками данного патента являются присутствие перемагничивания катушек, что влечет за собой дополнительные потери на преодоление ЭДС самоиндукции катушек и трата на перемагничивание сердечника по петле гистерезиса, компоновка катушек лучами в двигателе уменьшает возможность дополнительной установки числа катушек и магнитов, участвующих в образовании вращательного момента, тем самым ухудшая вращающий момент, возможность увеличения мощности только за счет увеличения диаметра двигателя, что ограничивает его универсальность. Невозможность генерации энергии во время механической работы, поскольку для выработки энергии, двигатель должен работать как генератор, замедляя движение транспорта.
[6]Также из уровня техники известен бесколлекторный мотор-генератор, включающий ротор с постоянным магнитом и статор, обмотка которого выполнена округлого поперечного сечения, при этом статор выполнен сферообразным, охватывающим магнит, на внешней поверхности статора расположена обмотка в виде изолированных друг от друга слоев, формирующих от 1 до 12 катушек статора с равномерно смещенными полюсами друг относительно друга, ротор выполнен в виде вала с жестко закрепленным на нем постоянным магнитом, вектор магнитного поля полюсов магнита ориентирован перпендикулярно оси вращения вала, при этом ось симметрии статора совпадает с осью вращения вала (см. RU 2726153, 09.07.2020).
[7]Недостатками данного патента являются присутствие перемагничивания катушек, что влечет за собой дополнительные потери на преодоление ЭДС самоиндукции катушек, присутствие рассеивания магнитного поля с внешних (обращенных от ротора) магнитных полюсов катушек, что так же ведет к потерям КПД двигателя, при работе часть катушек не используется, а значит отношение вырабатываемой механической энергии к весу не большое, также используется только один магнит, возможность увеличения мощности только за счет увеличения диаметра двигателя, что ограничивает его универсальность, а также невозможность генерации энергии во время механической работы, т.е. для выработки энергии, двигатель должен работать как генератор, замедляя движение транспорта.
[8]Также из уровня техники известен бесколлекторный электродвигатель постоянного тока, содержащий корпус с электромагнитами, ротор, на котором установлены постоянные магниты, отличающийся тем, что с магнитопроводящим корпусом своими магнитопроводами жестко связаны электромагниты, расположенные равномерно по окружности одноименными полюсами к центру окружности, в корпусе находится валом с магнитопроводчящим диском, с которым жестко связаны постоянные магниты, расположенные в таком же количестве, как и электромагниты, равномерно по окружности одноименными полюсами к центру окружности и с углом в 1-10° к касательным линиям по их срединам и одинаково для них всех, имеется сеть постоянного тока, к которой подключены электромагниты с одинаковым направлением тока в их обмотках, в цепи этого подключения имеется включающее-выключающее на полпериода ток устройство, включающее в момент наибольшего притяжения постоянных магнитов и электромагнитов, направление тока в обмотках электромагнитов имеется в сторону, при которой они притягиваются к постоянным магнитам (см. RU 2017142205, 04.06.2019).
[9]Недостатком этого двигателя являются большие потери мощности на рассеивание магнитного поля на незадействованных полюсах магнитов и катушек, невозможность регулировки оборотов за счет изменения скважности сигнала, компоновка катушек лучами в двигателе уменьшает возможность дополнительной установки числа катушек и магнитов, участвующих в образовании вращательного момента, тем самым ухудшая вращающий момент, Возможность увеличения мощности только за счет увеличения диаметра двигателя, что ограничивает его универсальность.
[10]Раскрытие изобретения
[11]Техническими результатами заявленного изобретения являются повышенная мощность и производительность двигателя, создание более мощного сконцентрированного магнитного поля взаимодействия со статором и вращающий момент на роторе, простота и возможность конструктивного наращивания мощности двигателя стандартными блоками без замены всего электродвигателя, за счет увеличения длины конструкции без увеличения диаметра ЭД, сохраняя минимальное лобовое сопротивление при продольной его установке на летательные или подводные аппараты, способность одновременно работать в режиме двигателя и генерировать энергию без изменения скорости вращения и без увеличения потребления от источника питания, при подключении нагрузки на генерирующие выводы двигателя.
[12]Вышеуказанные технические результаты достигаются импульсным бесколлекторным электродвигателем, содержащим ротор и статор, которые имеют немагнитопроводящий корпус, при этом статор используется «барабанного типа» и представляет собой несколько катушек, которые установлены между двумя частями статора и каждая из которых намотана на магнитопроводящий сердечник, образуя электромагниты, которые установлены в статоре «барабанного типа» параллельно друг другу и равномерно по четному количеству окружностей, а питание к катушкам подводится импульсами так, чтобы они все имели всегда одну и ту же полярность и направлены в одну сторону, причем катушки одной окружности имеют противоположную магнитную направленность относительно катушек соседних окружностей, по обе стороны статора на одной оси, закрепленной в подшипниках статора, расположены диски ротора с постоянными магнитами, при этом магниты на дисках ротора так же расположены равномерно по четному количеству окружностей, количество постоянных магнитов на каждом диске ротора соответствует количеству электромагнитов в статоре, а радиус размещения магнитов на диске ротора равен радиусу размещения электромагнитов в статоре, магниты на дисках ротора расположены с обеих сторон напротив полюсов электромагнитов статора, при этом постоянные магниты каждой окружности имеют ориентацию одной полярности причем магниты одной окружности имеют противоположную магнитную направленность относительно магнитов соседних окружностей, магниты на дисках ротора расположены с обеих сторон на против полюсов электромагнитов статора и магнитное поле магнитов на одном диске ротора является продолжением магнитного поля на противоположном диске ротора соответствующих окружностей, магниты между соседними окружностями роторов соединены попарно магнитопроводами.
[13]Краткое описание чертежей
[14]На фиг. 1 представлен общий вид импульсного бес коллекторного электродвигателя.
[15]На фиг. 2 представлен один из вариантов схематичного вида импульсного бесколлекторного электродвигателя сбоку, на котором расположение катушек и их электромагнитное поле в статоре и магнитное поле магнитов, соединенных магнитопроводом в роторе имеют одинаковую направленность магнитных полей, поскольку двигатель при изменении полярности может работать как на притяжении ротора и статора (представленный вариант фиг. 2), так и при его отталкивании.
[16]На фиг. 3 представлена одна из логик работы двигателя, поскольку двигатель при изменении полярности может работать как на притяжении ротора и статора, так и при его отталкивании.
[17]На фиг. 4 представлены некоторые схемы питания и регулировки оборотами ЭД.
[18]На фиг. 5 представлена схема соединения магнитов концевых дисков ротора попарно магнитопроводом.
[19]На фиг. 6 представлена блочная система компоновки электродвигателя с закольцованным магнитным полем концевых дисков ротора.
[20]На фиг. 7 представлено фото действующей модели электродвигателя Д.В. Сергеева с закольцованным магнитным полем ротора и двухрядной компоновкой магнитов на роторе и катушек на статоре.
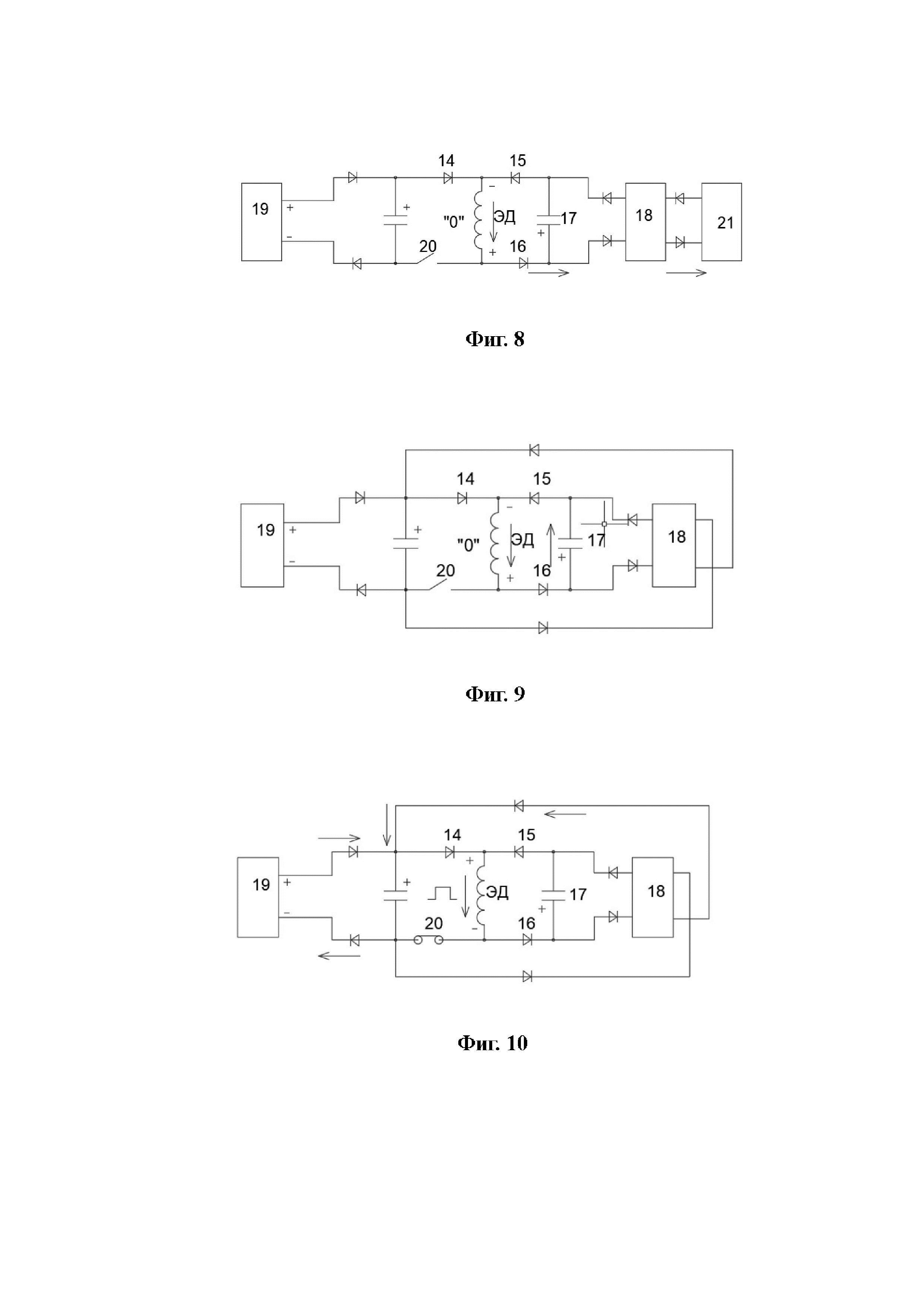
[21]На фиг. 8 представлена фаза работы ЭД при отсутствии питающего импульса с выводом ЭДС самоиндукции на нагрузку.
[22]На фиг. 9 представлена фаза работы ЭД при отсутствии питающего импульса с выводом ЭДС самоиндукции на компенсацию работы двигателя.
[23]На фиг. 10 представлена фаза работы ЭД при подаче на него питающего импульса с подпиткой ЭД от накопленной ЭДС самоиндукции.
[24]На фиг. 11 представлена фаза работы ЭД при подаче на него питающего импульса с подпиткой ИП от накопленной ЭДС самоиндукции.
[25]На фиг. 12 представлен график питающих импульсов на ЭД. Импульсы только одной полярности. Меняется скважность и амплитуда. Так же, импульсы могут быть наполнены с помощью ШИМ модуляции.
[26]Осуществление изобретения
[27]Заявленный импульсный бес коллекторный электродвигатель содержит корпус с электромагнитами 1, концевые диски 2, добавочные диски 22 (фиг. 6), ось 3, подшипник 4, магниты малого радиуса 5 (при частном случае двухрядной компоновки), магниты большого радиуса 23 (при частном случае двухрядной компоновки), магнитопроводы 6, катушки-электромагниты малого радиуса 7 (при частном случае двухрядной компоновки), катушки-электромагниты большого радиуса 24 (при частном случае двухрядной компоновки), диск магнитного повторителя 8, магниты магнитного повторителя 9, датчик 10, рычаг датчика 11, стойка рычага 12, подставка 13, диоды 14, 15, 16, конденсатор 17, сопрягающее устройство 18, источник питания 19, управляющий ключ 20, накопитель электроэнергии 21, блок ШИМ 25.
[28]Заявленный импульсный бесколлекторный электродвигатель работает следующим образом. (см.: фиг. 1 и фиг. 3).
[29]С источника постоянного тока 19 через регулирующее или модифицирующее напряжение устройство (это может быть стабилизатор постоянного тока с регулируемым напряжением, ШИМ контроллер постоянного тока и пр.) через размыкатель 20, управляемый датчиком Холла 10 (герконом или другим прерывателем), отслеживающим положение вала ротора 3, подается на обмотки электромагнитов постоянное напряжение одной полярности.
[30]Униполярный Датчик Холла 10 (или другой прерыватель) отслеживает положение магнитов 5, 23 или 9 (в зависимости от места установки датчика 10). В зависимости от того, находится ли магнит данной полярности напротив него или нет - подает управляющий сигнал (логический «0» или «1») на размыкатель 20, который отключает или подает постоянное напряжение одновременно на все обмотки электромагнитов 7, 24, создавая импульсное напряжение питания.
[31]При подаче напряжения одновременно на все электромагниты 7, 24, возникает электромагнитное поле, взаимодействующее со всеми магнитами 5, 23 на обоих дисках, и притягивает (или отталкивает - зависит от полярности подключения статора) к себе (от себя) магниты 5, 23, создавая вращательное движение. (фиг. 3 А).
[32]После того, как соответствующие магниты будут находиться напротив сердечников катушек, датчик отключит питание электромагнитов (Фиг. 3 «Б»). При этом произойдет, не требующая каких-либо энергетических затрат, дальнейшее движение ротора по инерции.
[33]Отсутствие принудительной смены полюсов электромагнитов способствует экономии энергии и повышению эффективности данного электродвигателя за счет отсутствия необходимости перемагничивания по петле Гистерезиса сердечников катушек электромагнитов и затрат энергии на противодействие ОЭДС катушек статора. Далее цикл повторяется (Фиг. 3 «В»). Описанный физический принцип создает вращательное движение.
[34]Для простоты приведена компоновка двухрядного расположения магнитов и электромагнитов бес коллекторного ЭД. Но логика работы может быть применена и для 4-6-8 и более рядных компоновок ЭД.
[35]Для более эффективного использования магнитного поля магнитов и предотвращения его рассеивания и потерь, используется схема многорядного расположения магнитов и электромагнитов. При этом, магниты ротора 5 расположенные по одному радиусу, имеют одинаковую направленность магнитного поля, а магниты 23, расположенные по другому радиусу - другую. Тоже относится и к электромагнитам статора 7 и 24 и их электромагнитным полям. Для уменьшения потерь при рассеивании из полюсов и усиления магнитного поля магнитов ротора в сторону статора, магниты одного радиуса 5 соединены с магнитами другого радиуса 23 попарно магнитопроводами 6.
[36]Катушки статора 7 и 24 статичны. Магниты 5 и 23 вращаются с дисками ротора 2 и проходят мимо статичных полюсов катушек статора.
[37]Благодаря магнитопроводам 6, магнитное поле магнитов ротора не рассеивается во вне, а проходя по магнитопроводам между парными магнитами 5 и 23, сконцентрировано на сторонах магнитов, направленных в сторону статора, что приводит к большей эффективности и силе взаимодействия ротора и статора.
[38]Место установки датчика Холла 10 - напротив вращающегося ротора с постоянными магнитами или «магнитного повторителя положения магнитов на роторе» (диск 8 с количеством магнитов 9, равным количеству пар магнитов на одном диске ротора), положение магнитов 9 на магнитном повторителе соответствует «лучам» пар магнитов и равно количеству этих пар.
[39]Напротив одного из дисков 2 (или магнитного повторителя 8) устанавливается рычаг 11 с закрепленной осью на против оси ротора. Длина рычага подбирается так, чтобы датчик Холла 10 находился напротив проходящих мимо него магнитов 5, 23, или 9, так же, изменяя длину рычага, можно изменять скважность управляющих импульсов. Положение датчика 10 меняется поворотом и (или) длиной рычага 11, и определяется опытным путем для наиболее эффективной работы двигателя, при этом, для эффективной работы угол корректируется при изменении скорости. Изменение направления вращения электродвигателя происходит так же изменением положения датчика 10 относительно магнитов.
[40]Управление оборотами двигателя происходит за счет изменения амплитуды, подаваемых импульсов одной полярности (Фиг. 12). Так же для управления можно использовать ШИМ (широко-импульсная модуляция) модулятора 25 постоянного тока, установив его между схемой управления ЭД и источником постоянного тока 19. (Фиг. 4)
[41]Питание на статор ЭД (электродвигатель) подается всегда импульсами только одной полярности, не происходит постоянная смена полярности постоянного тока, подаваемого на электромагниты статора, как это сделано в других импульсных двигателях, все катушки имеют однонаправленное магнитное поле и этим достигается снижение затрат энергии за счет потребления энергии только первые полпериода работы, отсутствие необходимости перемагничивать сердечники электромагнитов статора, а также дополнительных трат энергии на преодоление петли Гистерезиса в сердечниках электромагнитов и ЭДСC (электродвижущая сила самоиндукции) катушек, поскольку на дисках все магниты имеют одну ориентацию и полюсами смотрят в одну сторону.
[42]Примененная в заявке компоновка импульсного двигателя, где при работе задействуются оба полюса электромагнитов статора (катушек), а не один, как в имеющихся в настоящее время импульсных двигателях, работающих на тех же или иных принципах, а так же концентрация магнитного поля магнитов 5, 23 ротора в сторону катушек 7, 24 статора, в 2 раза повышает полезную работу и мощность данного устройства.
[43]Также в заявленном импульсном электродвигателе возможно использование ЭДС самоиндукции катушек статора импульсного электродвигателя как дополнительного источника энергии.
[44]После прохождения импульса через электромагнит (на нулевом цикле импульса) на обмотках статора электродвигателя генерируется ЭДС самоиндукции (ЭДСС), которой можно запитать подключенную на генерирующие выводы электродвигателя нагрузку без уменьшения скорости вращения двигателя и без увеличения потребления энергии от источника питания, что проверено опытами.
[45]Ниже приведены примеры снятия ЭДСС с двигателя-генератора:
[46]При размыкании управляющего ключа 20, ЭДСС обмоток статора ЭД через диоды 16 и 15 накапливается в конденсаторе 17, который так же сглаживает пульсации ЭДСС и преобразует пульсирующее напряжение ЭДСС в постоянное (фиг. 8-9). Диод 16 препятствует подаче питания от конденсатора 17 в цепь управления ЭД, диоды 16 и 15 запирают подачу питания на нагрузку 18 и (или) сопрягающее устройство 18 от ИП (источник питания) 19, тем самым, препятствуя потреблению энергии нагрузкой 18 от ИП 19 (т.е. , в данной фазе работы, нагрузка 18 не может потреблять питание от ИП 19).
[47]Снимаемая при этом мощность ЭДСС, накопленная в конденсаторе 17, может быть направлена через сопрягающее устройство 18 на питание нагрузки или зарядки накопителя электроэнергии 21 (фиг. 8). (Заявителем в качестве нагрузки на прямую без сопрягающего устройства использовались лампы накаливания различной мощности от 12V до 220V), или (и) подавая питание на ЭД после источника питания 19, (фиг. 10), или напрямую подпитывая источник питания 19 (фиг. 11), тем самым, частично компенсируя затраты на потребляемую двигателем энергию.
[48]Для более устойчивой работы двигателя, можно на ось ЭД1 поставить второй такой же ЭД2, но магниты ЭД2 расположить со сдвигом относительно магнитов ЭД1 так, чтобы в проекции с торца вала они располагались строго между магнитами ЭД1. Тогда при «0» полупериоде на ЭД1 на ЭД2 будет «1» полупериод и на валу сохранится стабильный положительный момент сил.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}