[1]Полезная модель относится к коммунальному машиностроению, в частности, к устройствам для манипуляций с контейнерами для твердых бытовых отходов при их перегрузке в кузов мусоровоза и может быть использована для сбора отходов из контейнеров коммунальных служб и домашних хозяйств, а также для других целей.
[2]В патенте КНР на полезную модель CN213701200U описывается манипулятор, содержащий опору, закрепленную на поворотном основании. Поворотное основание манипулятора установлено на выделенной для манипулятора части платформы транспортного средства. Существенным недостатком известного устройства является неэффективное использование площади основания транспортного средства.
[3]В патенте КНР CN210883751U на полезную модель раскрыт манипулятор, нижняя часть которого закреплена на механизме горизонтального перемещения, выполненного в виде шарнирно-сочлененных рычагов. Достоинством известного манипулятора является возможность перемещения контейнеров на большое расстояние вдоль кузова (бункера) транспортного средства. В известном манипуляторе основание закреплено на оси, расположенной за пределами габаритов кузова, что снижает надежность устройства. Позиционирование манипулятора перед выгрузкой контейнера в кузов существенно затруднено.
[4]В заявке CN110203588A на выдачу патента КНР раскрыт манипулятор, закрепленный на раме, выполненной с возможностью горизонтального перемещения под кузовом транспортного средства. Манипулятор обладает повышенной прочностью и надежностью, но сложен в изготовлении. При использовании манипулятора возможно заклинивание рамы в результате перекоса. Кроме того, в манипуляторе отсутствуют простые средства для точного позиционирования контейнера перед его выгрузкой в кузов транспортного средства.
[5]Наиболее близким решением к предложенной полезной модели может считаться устройство, раскрытое в патенте РФ RU7668U1. Известное устройство содержит манипулятор с поворотной рамой, расположенной под кузовом транспортного средства.
[6]Рама вращается вокруг оси, перемещаясь по опорному сектору с использованием одного гидроцилиндра. Известное устройство обладает повышенной прочностью. Для обеспечения выгрузки контейнера в бункер транспортного средства требуется установка стрелы манипулятора перпендикулярно соответствующей стенке бункера. Недостаток известного устройства заключается в том, что в нем отсутствуют средства точного позиционирования поворотной рамы и стрелы манипулятора, в связи с чем при использовании устройства возможны повреждения контейнера либо потеря содержимого контейнера при выгрузке в случае некорректного управления устройством.
[7]Таким образом, в уровне техники существует необходимость в создании универсального манипулятора, максимально использующего площадь рамы шасси транспортного средства и обеспечивающего при этом высокую надежность работы и точность управления в процессе выгрузки контейнера.
[8]Создание такого манипулятора обеспечит упрощение работы оператора при манипуляциях с контейнерами, сократит время операций по выгрузке контейнера, то есть время от установки контейнера в разгрузочное положение до возвращения контейнера к месту его использования, обеспечит продление срока службы контейнеров и бункера транспортного средства.
[9]Настоящая полезная модель предназначена для устранения недостатков уровня техники и достижения технического результата, заключающегося в повышении точности позиционирования контейнера при его выгрузке в бункер манипулятором.
[10]Для достижения указанного технического результата:
[11]опорно-поворотный блок манипулятора мусоровоза с боковой загрузкой содержит силовой шарнир с вертикальной осью вращения, первый край которого закреплен у первого узкого края продолговатой рамы манипулятора, а второй предназначен для закрепления на первой продольной балке надрамника, предназначенного для установки на шасси транспортного средства;
[12]на второй продольной балке надрамника шарнирно закреплен первый шток двойного гидроцилиндра, второй шток которого шарнирно прикреплен к раме манипулятора;
[13]двойной гидроцилиндр выполнен с возможностью раздельного управления перемещением штоков;
[14]блок содержит закрепленные на раме со стороны ее второго узкого края вертикальные стойки крепления рычагов манипулятора, в верхних и нижних частях которых выполнены проушины, предназначенные для крепления шарниров манипулятора;
[15]к надрамнику в зоне, предназначенной для расположения под кузовом мусоровоза, прикреплена горизонтальная опорная дуга с верхней антифрикционной поверхностью, на которой расположены антифрикционные накладки, прикрепленные к нижней части рамы.
[16]В частном случае реализации опорная дуга закреплена с внешней стороны второй продольной балки надрамника, например, на поперечных балках, каждая из которых прикреплена к первой и второй продольным балкам надрамника. В другом частном случае реализации опорно-поворотный блок содержит средство подвески цилиндра гидроцилиндра.
[17]Шарнир второго штока гидроцилиндра может быть прикреплен к раме манипулятора через узел регулировки положения оси шарнира относительно рамы манипулятора, а узел регулировки положения оси шарнира относительно рамы манипулятора может быть выполнен с возможностью такой установки положения оси шарнира относительно рамы манипулятора, что при одном выдвинутом штоке гидроцилиндра и убранном другом штоке гидроцилиндра обеспечивается размещение продольной оси рамы манипулятора перпендикулярно продольной оси надрамника. При этом ход первого штока двойного гидроцилиндра может быть равен ходу второго штока двойного гидроцилиндра.
[18]Расстояние между продольными балками надрамника в зоне размещения рамы манипулятора может увеличиваться от средней части надрамника к его внешнему краю, по крайней мере одна из проушин каждой из стоек подвеса манипулятора может быть предназначена для размещения за габаритами кузова мусоровоза.
[19]Сущность полезной модели поясняется чертежами, на которых показаны:
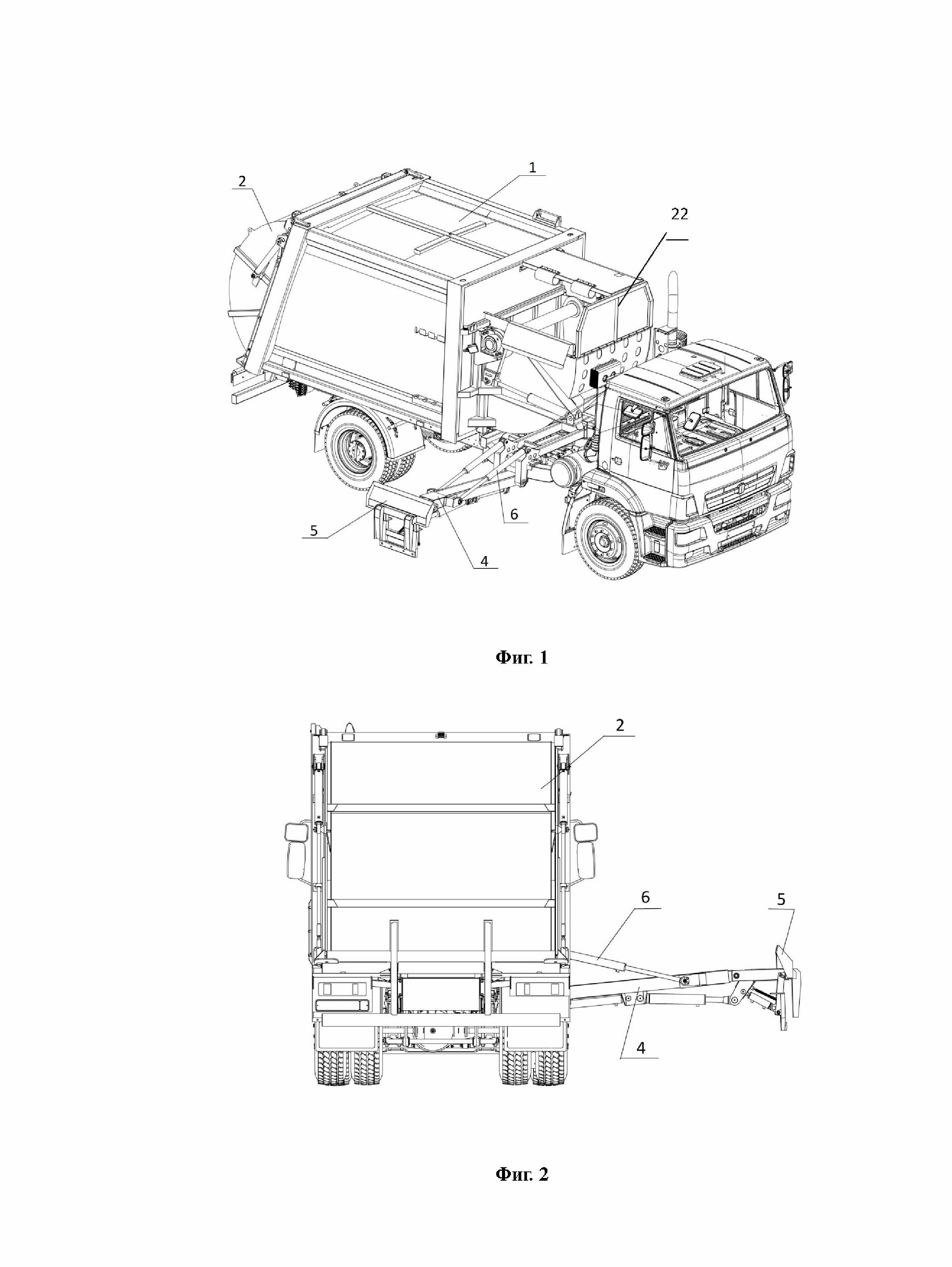
[20]фиг. 1 - общий вид мусоровоза с боковой загрузкой;
[21]фиг. 2 - мусоровоз с боковой загрузкой (вид сзади);
[22]фиг. 3 - надрамник с поворотной рамой (вид сбоку);
[23]фиг. 4 - надрамник с поворотной рамой (вид сверху);
[24]фиг. 5 - надрамник с поворотной рамой (поворотная рама в крайнем левом
[26]фиг. 6 - надрамник с поворотной рамой (поворотная рама в крайнем правом
[28]фиг. 7 - поворотная рама (вид снизу);
[29]фиг. 8 - общий вид поворотной рамы;
[30]фиг. 9 - поворотная рама (вид спереди);
[31]фиг. 10 - поворотная рама (вид сбоку);
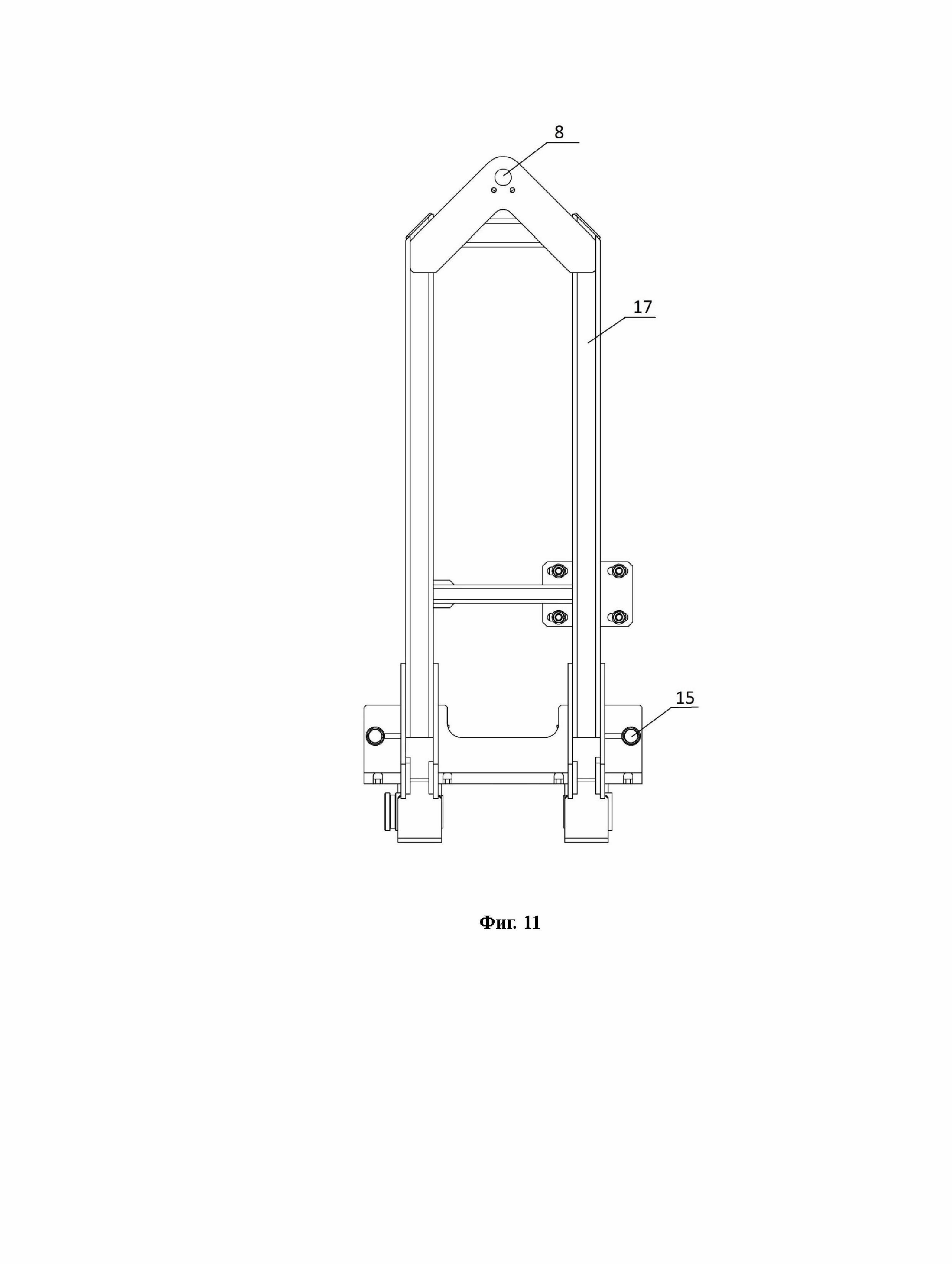
[32]фиг. 11 - поворотная рама (вид сверху).
[33]Как показано на фиг. 1, мусоровоз с боковой загрузкой, в котором использована полезная модель, содержит установленное на шасси транспортного средства оборудование, предназначенное для сбора, перевозки и выгрузки твердых бытовых, коммунальных и других отходов. В частности, на шасси установлены кузов 1 спрессующей плитой и задним бортом 2, надрамник 3 (фиг. 3-6), манипулятор со стрелой 4 и захватом (кантователем) 5.
[34]Иллюстративно представленное на фиг. 1-11 оборудование обеспечивает сбор отходов из всех существующих видов контейнеров объемом до 2200 л.
[35]Манипулятор грузоподъемностью 700 кг с захватом 5 предназначен для механизированного сбора отходов, накапливаемых в контейнерах. Манипулятор устанавливается шарнирно на надрамнике преимущественно с правой стороны мусоровоза.
[36]На фиг. 2 раскрыта конструкция манипулятора. Основной рычаг (стрела) 4 манипулятора в одном из примеров реализации шарнирно закреплен с использованием нижних проушин 12 стоек 23 крепления рычагов манипулятора. Верхние проушины 13 стоек 23 используются раздельно для шарнирного закрепления 6 гидравлических цилиндров (гидроцилиндров) 6 подъема/опускания стрелы манипулятора. Также возможно использовать крепление стрелы манипулятора с использованием верхних проушин, а крепление гидроцилиндров - с использованием нижних проушин, однако показанный на чертежах вариант крепления манипулятора является предпочтительным, поскольку в процессе транспортировки отходов при реализации указанного варианта штоки гидроцилиндров располагаются внутри корпусов и не подвержены разрушительному влиянию окружающей среды.
[37]На рычаге 4 закреплен захват (кантователь контейнеров) с использованием вспомогательного рычага 19 манипулятора, вспомогательного гидроцилиндра 20 манипулятора и гидроцилиндра 21 захвата 4. Указанные элементы обеспечивают возможность перемещения захвата в продольном, относительно стрелы манипулятора, направлении. Также возможно применение телескопической системы для управления перемещением захвата. Стойки могут быть закреплены на раме с использованием усиливающих вставок 16, выполненных в частном случае как конструктивные элементы соответствующих стоек.
[38]Как показано на фиг. 2-6, надрамник содержит продольные балки 3, расположенные преимущественно параллельно. Для повышения прочности и надежности устройства расстояние между балками 3 увеличивается по направлению к внешнему краю надрамника. Такое выполнение снижает торсионные нагрузки на балки надрамника, обеспечивает возможность использования удлиненной рамы подвески манипулятора, что, в свою очередь, повышает максимально допустимую нагрузку на рычаги манипулятора.
[39]На одной из продольных балок 3 надрамника, между балок 3, закреплена ось 24 шарнира, предназначенного для закрепления одного из узких краев 25 поворотной рамы, например, с использованием крепления 26 шарнира с проушиной 8, через которую проходит ось 24.
[40]Один из штоков сдвоенного (двойного) гидроцилиндра 9 закреплен с использованием шарнирного соединения 10 на второй продольной балке надрамника, а шток закреплен с использованием узла 11 крепления шарнирного соединения, закрепленного на раме 17. Крепления двойного гидроцилиндра выполнены с возможностью регулировки их положения. Например, как показано на фиг. 11, крепление 11 установлено на раме 17 с использованием фланца 27, крепежные отверстия в котором выполнены продолговатыми. Такое выполнение обеспечивает возможность регулирования положения фланца и оси соответствующего шарнирного соединения относительно поворотной рамы 17. Такое выполнение узла крепления шарнира обеспечивает реализацию возможности регулировки положения оси шарнира относительно рамы манипулятора, за счет чего обеспечивается возможность регулирования положения оси шарнира относительно рамы манипулятора. В частном случае ось шарнира может быть установлена в положение, где при одном выдвинутом штоке гидроцилиндра и убранном другом штоке гидроцилиндра обеспечивается размещение продольной оси рамы манипулятора перпендикулярно продольной оси надрамника (центральное положение рамы).
[41]На продольных балках надрамника закреплены поперечные балки 29, 28 надрамника, предназначенные для крепления поворотной дуги 7 надрамника. Дуга 7 используется в качестве опоры для рамы при ее повороте и преимущественно устанавливается с внешней стороны второй продольной балки надрамника. Верхняя поверхность дуги 7 выполнена антифрикционной. Придание верхней поверхности дуги антифрикционных свойств может быть обеспечено путем, например, полировки верхней поверхности материала, из которого изготовлена дуга 7. На антифрикционной поверхности дуги расположены сменные антифрикционные накладки или проставки 14, в частном случае выполненные из капролона. Проставки 14 выполнены сменными и прикрепляются к нижней части рамы с использованием болтов 15.
[42]Для продления срока службы гидроцилиндра за счет компенсации вертикальных нагрузок опорно-поворотный блок содержит средство подвески 18 цилиндра (корпуса) гидроцилиндра. В связи с тем, что конструкция опорно-поворотного блока предусматривает возможность перемещения цилиндра относительно любого из элементов опорно-поворотного блока, средство подвески 18 предусматривает «плавающее» крепление цилиндра к надрамнику. Для этого в частном случае реализации к продольной балке надрамника шарнирно прикреплена расположенная горизонтально пластина с пазом постоянной ширины, при этом ось шарнира расположена вертикально. Через паз проходит стержень, нижний край которого закреплен на верхней части цилиндра, а верхний край снабжен опорой, перемещающейся по верхней поверхности пластины при перемещениях цилиндра. Расстояние между опорой и верхней частью цилиндра выбирается таким, чтобы минимизировать поперечные нагрузки на штоки гидроцилиндра.
[43]В случае если ход первого штока двойного гидроцилиндра равен ходу второго штока двойного гидроцилиндра, то обеспечивается возможность точного позиционирования рамы в среднем положении с использованием любого из штоков. Следует отметить, что большинство изготавливаемых двойных гидроцилиндров имеет указанную особенность. В частных случаях конструкция гидроцилиндра может предусматривать возможность регулирования длины штока гидроцилиндра, где длина штока влияет на его ход, то есть на расстояние между крайними положениями штока.
[44]При выполнении рычага (стрелы) манипулятора прямолинейны, предпочтительно, чтобы проушины стойки подвеса манипулятора, к которой крепится указанный рычаг, были расположены за габаритами кузова мусоровоза. В этом случае обеспечивается возможность вертикальной установки стрелы манипулятора в процессе движения мусоровоза (транспортного средства). Такой же результат может быть достигнут при использовании изогнутой стрелы манипулятора, в таком случае расположение проушин может быть иным.
[45]При использовании транспортное средство перемещается к зоне установки контейнеров, например, контейнеров для твердых бытовых отходов (далее - ТБО), так, чтобы выгружаемый контейнер находился в зоне действия манипулятора, преимущественно с правой стороны от транспортного средства при использовании устройства на дорогах с правосторонним движением. Необходимость в точном позиционировании транспортного средства относительно контейнера отсутствует. После установки транспортного средства оператор с использованием гидравлического цилиндра 6 управления положением стрелы 4 манипулятора, а также с использованием вспомогательного гидроцилиндра 20 управления положением вспомогательного рычага 19 манипулятора устанавливает захват 5 вблизи контейнера с ТБО. При необходимости осуществляется перемещение захвата путем поворота рамы 17 (фиг. 7-11), на которой закреплен манипулятор.
[46]Поворот рамы 17 и манипулятора в горизонтальной плоскости производится при помощи гидравлических штоков сдвоенного гидравлического цилиндра 9 двухстороннего действия. В том случае, когда захват манипулятора находится в нижнем положении, гидравлические системы каждого из штоков могут использоваться совместно, что упрощает управление положением манипулятора. Путем выдвижения двух штоков на полную длину и возврата штоков внутрь гидроцилиндра обеспечивается перемещение рамы 17 между крайними положениями.
[47]Перемещение рамы 17 в промежуточное положение может быть осуществлено таким же образом, например, путем установки одного или двух штоков сдвоенного гидроцилиндра в промежуточное положение. После частичного подъема контейнера рама манипулятора устанавливается в центральное положение, необходимое при опрокидывании контейнеров. Для установки манипулятора в центральное положение преимущественно необходимо полностью выдвинуть шток из одной секции гидравлического цилиндра и полностью втянуть другой шток в другую секцию. При необходимости может быть осуществлена регулировка положения манипулятора с помощью подвижного кронштейна. Необходимость в регулировке может возникнуть при износе конструктивных элементов устройства либо при замене гидравлического цилиндра на новый, имеющий другие размеры.
[48]В проушинах, предназначенных для крепления гидравлических цилиндров подъема/опускания стрелы манипулятора, могут быть установлены дополнительные усиленные вставки, которые предотвращают возможность механического повреждения поворотной рамы и увеличивают срок эксплуатации данного узла.
[49]Положение плоскости установки захвата 5 регулируется гидроцилиндром захвата 5. Фиксация контейнера на захвате осуществляется с использованием указанных выше гидроцилиндров, например, путем подъема захвата с использованием гидроцилиндра 6.
[50]После фиксации контейнера на захвате необходимо поднять контейнер и выгрузить его содержимое в приемный бункер 22 кузова 1.
[51]При разгрузке контейнера важно, чтобы центральная часть захвата была расположена максимально близко к центру передней панели 23 бункера. Несоблюдение этого условия может привести к тому, что часть содержимого контейнера выгрузится мимо бункера, а также к срыву контейнера с захвата либо к поломке элементов системы, в которой используется полезная модель. Обеспечение точного позиционирования центральной части захвата при разгрузке обеспечивается показанным выше образом преимущественно путем выдвижения одного из штоков гидроцилиндров в крайнее положение и перемещения другого штока в крайнее положение внутри гидроцилиндра.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}