[1]Полезная модель относится к области автоматики и измерительной техники, в частности к магнитострикционным преобразователям перемещений, и может быть использована для измерения линейных перемещений в машинах и механизмах.
[2]Известен «Преобразователь перемещения в код» (Авторское свидетельство СССР №1115081), содержащий звукопровод из магнитострикционного материала, на концах которого расположены демпферы, катушку записи, размещенную по всей длине звукопровода, катушку считывания, расположенную возле одного из демпферов, выходы катушек считывания и записи соединены с входами преобразователя временного интервала в цифровой код, постоянный магнит, корпус из немагнитного материала и заполненный магнитной жидкостью, в корпусе размещены звукопровод, катушка записи и катушка считывания, а подвижный постоянный магнит расположен снаружи корпуса.
[3]Однако недостатком известного решения является снижение точности, обусловленное уменьшением амплитуды полезного сигнала в преобразователях с большим диапазоном измерения.
[4]Наиболее близким по технической сущности к полезной модели является «Магнитострикционный преобразователь перемещения в код» (Патент РФ на изобретение №2080559), содержащий магнитострикционную линию с демпферами на концах, электроакустический преобразователь, элемент возбуждения ультразвукового импульса, содержащий постоянные магниты и жестко связанный с объектом контроля, усилитель-формирователь, формирователь импульсов тока, генератор счетных импульсов, счетчик, регистры памяти, буферный формирователь, дешифратор адреса, формирователь запуска, формирователь сигнала готовности и шину обмена.
[5]Недостатком данного технического решения является наличие погрешности измерений, обусловленной изменением амплитуды и формы сигнала при изменении положения магнитов, входящих в состав элемента возбуждения ультразвукового импульса.
[6]Техническим результатом заявляемой полезной модели является повышение точности измерений линейных перемещений.
[7]Заявляемый технический результат достигается тем, что в магнитострикционный преобразователь перемещений, содержащий звукопровод с демпферами на концах, электроакустический преобразователь, позиционный магнит, жестко связанный с объектом контроля, формирователь импульсов тока, дополнительно введены предварительный усилитель, электронный ключ, регулируемый усилитель, детектор пересечения нуля, управляемый компаратор, время-цифровой преобразователь и микроконтроллер, причем вход предварительного усилителя соединен с выходом электроакустического преобразователя, вход электронного ключа соединен с выходом предварительного усилителя, вход регулируемого усилителя соединен с выходом электронного ключа, выход регулируемого усилителя соединен с входом детектора пересечения нуля и входом управляемого компаратора, выход управляемого компаратора соединен с входом микроконтроллера, выход детектора пересечения нуля соединен с входом время-цифрового преобразователя и входом микроконтроллера, вход/выход время-цифрового преобразователя соединен с выходом/входом микроконтроллера, а управляющие цифровые выходы микроконтроллера соединены с электронным ключом, управляемым компаратором, регулируемым усилителем, время-цифровым преобразователем и формирователем импульсов тока.
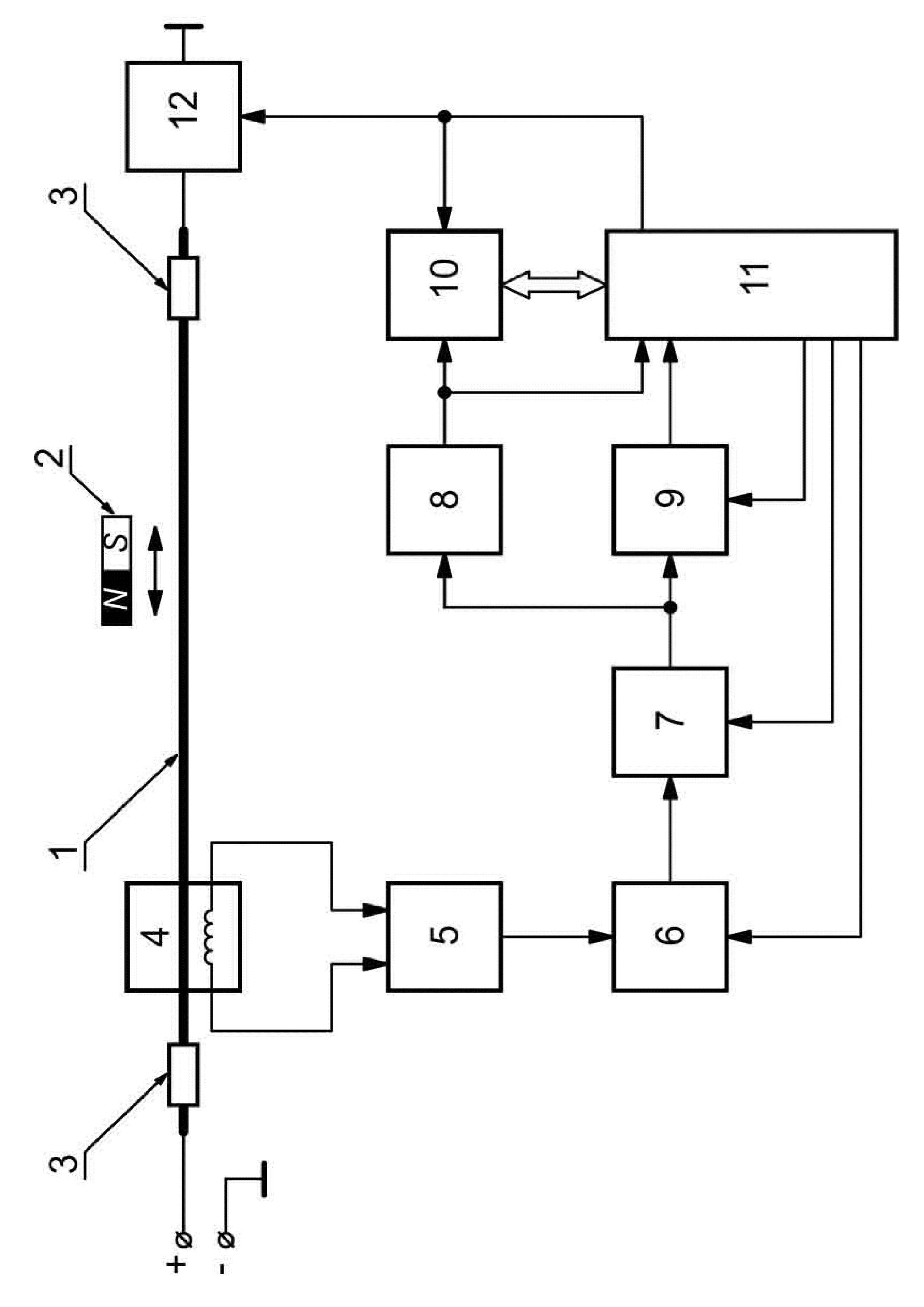
[8]Сущность предлагаемой полезной модели поясняется схемой, представленной на фигуре, где цифрами обозначены:
[10]2 - позиционный магнит;
[12]4 - электроакустический преобразователь;
[13]5 - предварительный усилитель;
[14]6 - электронный ключ;
[15]7 - регулируемый усилитель;
[16]8 - детектор пересечения нуля;
[17]9 - управляемый компаратор;
[18]10 - время-цифровой преобразователь;
[19]11 - микроконтроллер;
[20]12 - формирователь импульсов тока.
[21]Устройство работает следующим образом. Микроконтроллер 11 вырабатывает стартовый импульс, поступающий на формирователь импульсов тока 12 и время-цифровой преобразователь 10, запуская процесс измерения времени. Усиленный сигнал с формирователя импульсов тока 12, поступает в звукопровод 1. В звукопроводе в месте нахождения постоянного магнита 2, жестко связанного с объектом перемещения, возникает ультразвуковая крутильная волна, которая распространяется в обе стороны звукопровода. Дошедшая до конца звукопровода крутильная волна гасится демпфером 3.
[22]Крутильная волна, распространяющаяся в сторону электроакустического преобразователя 4, преобразуется в электрический сигнал. Электроакустический преобразователь 4 формирует два импульса напряжения. Первый импульс обусловлен прохождением по звукопроводу импульса тока возбуждения и не несет полезной информации, второй импульс вызван прямой ультразвуковой волной, возникшей под постоянным магнитом, и содержит информацию о положении позиционного магнита 2.
[23]Импульсы с электроакустического преобразователя 4 усиливаются предварительным усилителем 5 и поступают на электронный ключ 6, управляемый с микроконтроллера 11. Микроконтроллер открывает электронный ключ на время, равное длительности первого импульса, тем самым блокируя поступление импульса на регулируемый усилитель 7.
[24]Второй импульс, поступает на вход регулируемого усилителя 7, коэффициент усиления которого может задаваться при помощи микроконтроллера 11. Усиленный сигнал с выхода регулируемого усилителя 7 поступает на управляемый компаратор 9 и детектор пересечения нуля 8. Управляемый компаратор 9 вырабатывает прямоугольный импульс, когда входной сигнал превышает порог, заданный микроконтроллером 11. Детектор пересечения нуля 8 при переходе сигнала через нулевое значение, вырабатывает прямоугольные импульсы, которые поступают на время-цифровой преобразователь 10 и микроконтроллер.
[25]По фронту прямоугольного импульса с управляемого компаратора 9, микроконтроллер 11 выдает команду остановки измерения на время-цифровой преобразователь 10. Время-цифровой преобразователь 10 регистрирует время по спаду прямоугольного импульса с выхода детектора пересечения нуля и передает в микроконтроллер 11 код, соответствующий измеренному интервалу времени между стартовым импульсом и импульсом от позиционного магнита 2. Микроконтроллер 11 преобразует время в значение линейного перемещения.
[26]Амплитуда напряжения сигнала на выходе предварительного усилителя может меняться в зависимости от таких факторов, как тип применяемого магнита, расстояние позиционного магнита до звукопровода, материал, длина или неоднородность материала звукопровода. Изменяя коэффициент усиления регулируемого усилителя и порог управляемого компаратора, микроконтроллер обеспечивает установку оптимальной амплитуда напряжения сигнала, что позволяет повысить точность измерения за счет устранения погрешности, обусловленной изменением амплитуды сигнала. Алгоритм обработки сигнала определяется программой микроконтроллера.
[27]Применение детектора пересечения нуля позволяет регистрировать сигнал, соответствующий положению позиционного магнита, независимо от амплитуды напряжения сигнала и его формы.
[28]В качестве время-цифрового преобразователя может быть использован интегральный преобразователь типа TDC-GP22, что позволяет осуществлять измерение временных интервалов с высоким разрешением.
[29]Таким образом, предлагаемая полезная модель обеспечивает высокую точность измерения за счет применения регулировки уровня сигнала, а также измерения времени по моменту пересечения сигналом нулевого значения, что позволяет устранить погрешность, обусловленную влиянием внешних факторов.



{kind=link}