[1]Полезная модель относится к захватам промышленных роботов, а именно к захвату робота-манипулятора.
[2]Из уровня техники известен, в частности, механический захват робота (см.CN101085525, опубл. 12.12.2007) (1), который состоит из двигателя, соединительной втулки, нижней пластины пальца и захватного устройства, при этом двигатель соединен с нижней пластиной пальца через корпус соединительной муфты, рукоятка шарнирно прикреплена к нижней пластине пальца, двигатель соединен с захватом через винтовой стержень. Когда прогрессивный двигатель вращается по часовой стрелке, если смотреть сзади, он вызывает вращение винтового стержня по часовой стрелке через муфту. Из-за правильной модели вращения основного винта винтового стержня он может ограничивать свободу направления вращения, при этом основной винт движется вниз, приводя в движение вниз нажимную пластину рукоятки, открывая пальцы и наоборот. Он прост, недорог, мал по размеру и гибок.
[3]Механическое регулирование в предложенном аналоге (1) приводит к тому, что губки могут занимать только строго определенное положение, что ограничивает возможности устройства.
[4]Также аналогом заявленной полезной модели является захват (см. US9266242B2, опубл. 23.02.2016) (2), в частности захват с пневматическим приводом, с корпусом, в котором образован линейный привод предпочтительно с пневматическим приводом. Захват также имеет первую и вторую захватные губки, которые соответственно установлены с возможностью поворота относительно корпуса вокруг оси поворота. Первая и вторая захватные губки соединены с линейным приводом таким образом, что линейное движение, создаваемое линейным приводом, соответственно преобразуется в поворотное движение первой и второй губок в направлении открытия или закрытия захватных губок. Для обеспечения надежного захвата первая и вторая захватные губки соединены друг с другом посредством синхронизирующего элемента таким образом, что при срабатывании линейного привода поворотный движения первой и второй губок синхронизированы.
[5]Недостаток захвата по (2) заключается в том, что он управляется посредством пневмопривода, что снижает точность и плавность его работы.
[6]Наиболее близким аналогом заявленного устройства, по мнению заявителя, механизм захвата (см. CN113459139A, опубл. 05.05.2020) (3). Механизм захвата содержит узел зажима и узел регулировки угла; зажимной узел и узел регулировки угла жестко соединены через опорное гнездо. Первый силовой модуль в зажимном узле приводит во вращение вращающийся механизм, соединенный с первым силовым модулем, так что две зажимные детали в зеркальной симметрии выполняют открытие, закрытие и зажим на точном расстоянии, и достигается точный зажим заготовок; второй силовой модуль в узле регулировки угла приводит во вращение регулировочный механизм, соединенный со вторым силовым модулем, регулировочный механизм вращается в прижимной детали через шестерню на подвижной детали, достигается точная регулировка угла захватного механизма, и заготовки, захваченные механизмом захвата, помещаются в точное положение; механизм захвата имеет простую конструкцию, точность зажима заготовки дополнительно повышается, заготовки можно размещать более точно, а эффективность захвата значительно повышается.
[7]В предложенном аналоге (3) механическое регулирование захвата приводит к тому, что губки могут занимать только строго определенное положение, что ограничивает возможности устройства.
[8]Краткое изложение изобретения
[9]Данное изобретение направлено на решение технической задачи, связанной с повышением надежности работы зажимного устройства.
[10]Техническим результатом изобретения является повышение качества сортировки, которое обеспечивается надежностью работы зажимного устройства.
[11]Технический результат достигается посредством создания захвата, который содержит две губки, размещенные на креплениях. Гибкие части губок закреплены в жестком корпусе посредством Т-образных креплений, выполненных на губках, и соответствующих им T-образных пазов в жестком корпусе, жесткие корпусы шарнирно соединены с креплениями и между собой, гибкие части губок выполнены в виде прямоугольной призмы, в которой внешняя сплошная стенка объединена внутренними параллельными ребрами жесткости.
[12]В частном варианте выполнения захват содержит по два Т-образных крепления на каждую губку.
[13]В частном варианте выполнения гибкая часть губки выполнена из пластика.
[14]В частном варианте выполнения гибкая часть губки выполнена на 3D-принтере.
[15]В частном варианте выполнения на каждой гибкой части губки выполнено по 5 ребер жесткости.
[16]Сущность полезной модели поясняется чертежами, на которых:
[17]фиг.1-4 - изображения захвата.
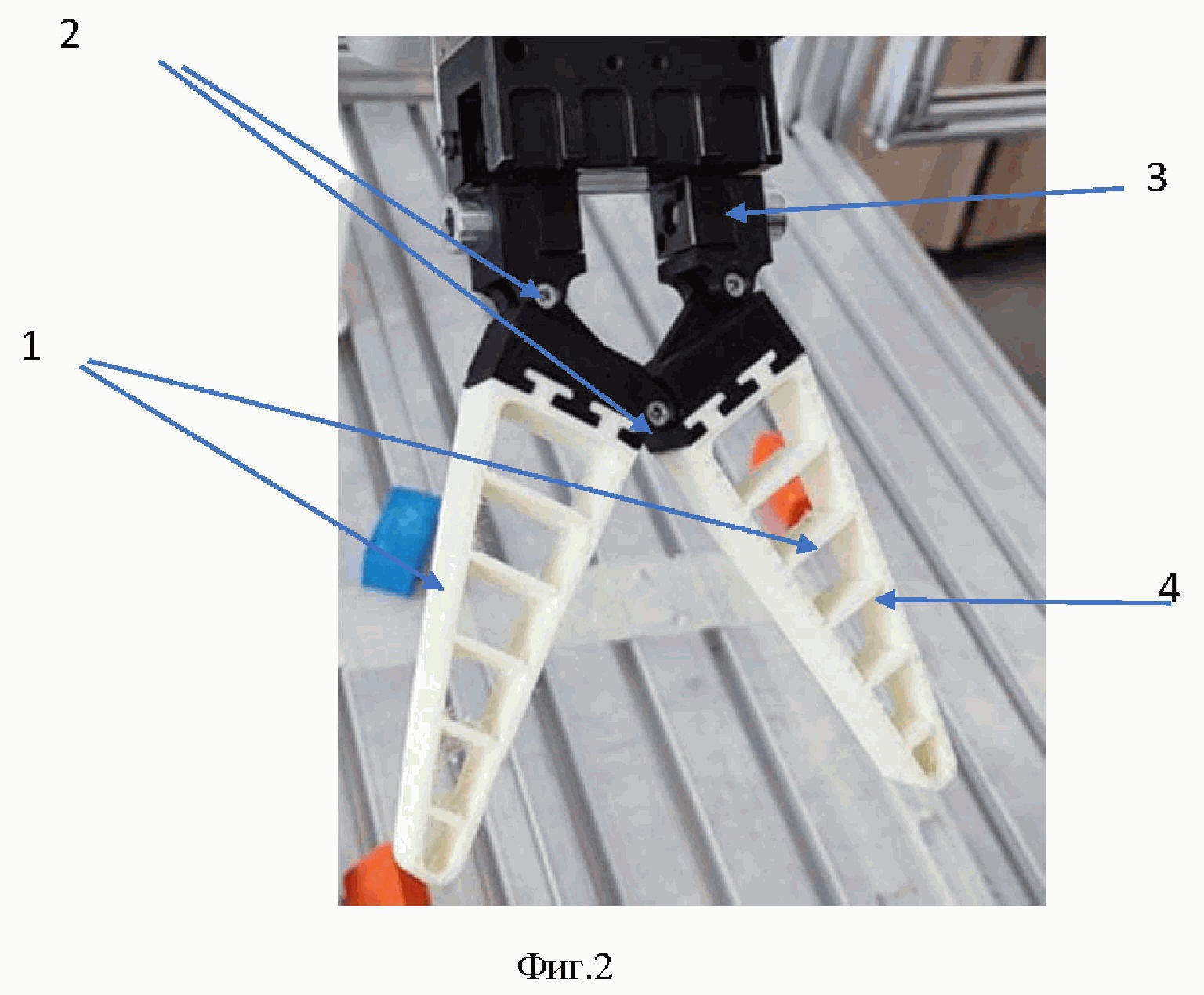
[18]Позиции на фиг.2 обозначают следующее:
[23]Эти чертежи не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
[24]Захват представляет собой размещенные на креплениях (3) промышленного робота губки (1). Губки предназначены для захвата и выполнены в виде гибкого элемента, соединенного с жестким корпусом посредством посредством Т-образных креплений, выполненных на губках, и соответствующих им T-образных пазов в жестком корпусе, преимущественно таких креплений выполнено по два на каждую губку. Таким образом, гибкие губки могут быть легко заменены при износе.
[25]Жесткие корпуса при помощи шарниров (2) соединены с креплениями (3) и между собой. В данной полезной модели не описывается привод захвата, подразумевается, что конструкция привода не ограничена каким-то одним его типом, а предполагает выбор из возможных.
[26]Гибкие части губок выполнены в виде прямоугольной призмы, в которой внешняя сплошная стенка объединена внутренними параллельными ребрами жесткости. Гибкие части губки преимущественно выполняют на 3D-принтере из пластика. Наибольшую эффективность показывают губки с 5 ребрами жесткости.
[27]Предложенный захват предназначен для ряда применений, включающих применение маркетплейсами, логистическими компаниями, а также в пищевой промышленности, металлургии, машиностроении, мусороперерабатывающими заводами, метизными заводами и др.


{kind=link}
{kind=link}