[1]Полезная модель относится к силовой электронике и может быть использовано при построении импульсных преобразователей постоянного напряжения с повышенным качеством выходной физической величины в широком диапазоне вариации параметров системы.
[2]Известен преобразователь напряжения (патент №2552520) с системой управления, построенной на основе метода направления на цель, где для обеспечения желаемого динамического режима предполагается использование дополнительной системы управления нелинейной динамикой, формирующей корректирующие воздействия, влияющие на работу основной системы управления.
[3]Обеспечение желаемого динамического режима происходит за счет того, что к сигналу регулятора основной системы управления прибавляется корректирующий сигнал системы управления нелинейной динамикой, который является суммой двух масштабированных с заданными коэффициентами разностей: разности между сигналом датчика тока дросселя в тактовые моменты времени и компонентой вектора задания на неподвижную точку траектории, соответствующей току дросселя; разности между сигналом датчика напряжения на конденсаторе в тактовые моменты времени и компонентой вектора задания на неподвижную точку траектории, соответствующей напряжению на конденсаторе, что позволяет обеспечить выход системы на заданную неподвижную точку траектории.
[4]К недостатку метода относится невозможность работы в широком диапазоне вариации параметров системы в связи с неоптимальностью фиксированных масштабирующих коэффициентов при изменении параметров системы в широком диапазоне, что может привести к реализации нежелательных динамических режимов.
[5]Задачей полезной модели является обеспечение гарантированной работы преобразователя напряжения в желаемом динамическом режиме с малой амплитудой колебаний выходного напряжения при изменении параметров системы в широком диапазоне.
[6]Данная задача решается за счет того, что к силовой части преобразователя, выполненного на основе непосредственного понижающего преобразователя с системой автоматического управления, состоящей из вычитателя, формирующего сигнал ошибки, усилителя обратной связи по напряжению, регулятора, на вход которого подается сигнал ошибки, а выходной сигнал подается на неинвертирующий вход компаратора, на инвертирующий вход которого поступает сигнал с генератора развертывающего напряжения, работающего синхронно с задающим генератором, что обеспечивает стабилизацию среднего значения выходного напряжения, подключена система управления нелинейной динамикой, отличающаяся тем, что дополнительно используются блоки адаптации масштабирующих коэффициентов, на вход которых подаются: информация о входном напряжении преобразователя, информация о задающем воздействии стандартной системы управления, выходной сигнал блока вычисления сопротивления нагрузки, на вход которого подается сигнал с датчика тока нагрузки и сигнал выходного напряжения, что обеспечивает вычисление оптимальных масштабирующих коэффициентов в зависимости от текущих параметров системы, которые рассчитываются с использованием метода Нелдера-Мида при поиске минимума целевой функции Fнд(K1,K2, …Kn)=abs(max(abs(ρi(K1,K2, …Kn)))-ρcт.цел), где ρст.цел - целевое значение мультипликатора, Ki - масштабирующие коэффициенты, ρi - i-й мультипликатор.
[7]Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является возможность обеспечения желаемого динамического режима в широком диапазоне изменения параметров системы.
[8]Сущность полезной модели поясняется чертежами, на которых изображено:
[9]Фиг. 1. Функциональная схема преобразователя.
[10]Фиг. 2 Диаграмма модулей мультипликаторов 1-цикла.
[11]Фиг. 3. Диаграмма модуля старшего мультипликатора 1-цикла.
[12]На Фиг. 1 представлена функциональная схема импульсного преобразователя, описание которого приведено в [патент №2552520]. Для повышения качественных показателей управления нелинейной динамикой в систему управления введен блок адаптации (БА) параметров алгоритма управления Ki к изменяющимся параметрам объекта управления, к которым чаще всего относятся: входное напряжение Uвх, сопротивление нагрузки Rн и напряжение задания Uз.
[13]На Фиг. 1 приняты следующие обозначения: R - активное сопротивление дросселя, L - индуктивность дросселя, С - емкость конденсатора, Rн - сопротивление нагрузки, Uвх - входное напряжение, (β1, β2 - масштабные коэффициенты, β - коэффициент обратной связи по напряжению, Uз - напряжение задания, Uи - импульсы управления силовым ключом, Uy - управляющий сигнал, Up - развертывающее пилообразное напряжение, ОСУ - основная система управления, СУНД - система управления нелинейной динамикой, ГРН - генератор развертывающих напряжений, ЗГ - задающий генератор, «==» - компаратор, УВХ, УВХ1, УВХ2 - устройства выборки-хранения, ВНТ1, ВНТ2 - вычислители компонентов вектора неподвижной точки отображения, БА - блок адаптации, УМ1, УМ2 - умножители, K1, K2 - коэффициенты пропорциональности, вычисляемые блоком адаптации, ВСН - вычислитель сопротивления нагрузки, Uош - ошибка основной системы управления, VD - силовой диод, VT - силовой транзистор, x2з, x1з - компоненты вектора задания на неподвижную точку 1-цикла, х2k, x1k - компоненты вектора обратных связей по переменным состояния в дискретные моменты времени, Δх2k, Δx1k - компоненты вектора отклонения текущей точки режима от заданной, uk1, uk2 - корректирующие воздействия.
[14]Метод адаптации коэффициентов Ki к изменяющимся параметрам системы следующий.
[15]Непосредственный понижающий преобразователь напряжения описывается системой дифференциальных уравнений с размерностью два. Классическая система автоматического управления с обратной связью по среднему значению выходного напряжения непосредственных преобразователей, работающих в режиме прерывистых токов, описывается стробоскопическим отображением вида [Кобзев, А.В. Нелинейная динамика полупроводниковых преобразователей / А.В. Кобзев, Г.Я. Михальченко, А.И. Андриянов, С.Г. Михальченко - Томск: Томск, гос. ун-т систем управления и радиоэлектроники, 2007. - 224 с]
[16]
[17]где  ; iL - ток дросселя; uс - напряжение на конденсаторе; zk1, zk2 - моменты коммутации в относительно времени на k-том тактовом интервале; Xx-1 - вектор переменных состояния системы в начале k-го тактового интервала;
; iL - ток дросселя; uс - напряжение на конденсаторе; zk1, zk2 - моменты коммутации в относительно времени на k-том тактовом интервале; Xx-1 - вектор переменных состояния системы в начале k-го тактового интервала;  - вектор.
- вектор.
[18]При использовании МНЦ вводятся дополнительные управляющие воздействия uik, которые определяются корректирующими функциями вида [1]
[19]
[20]Тогда стробоскопическое отображение для САУ на основе МНЦ имеет вид
[21]
[22]где Δzk - приращение коэффициента заполнения на k-том тактовом интервале.
[23]Указанное приращение может быть найдено на основе выражения
[24]
[25]Функция переключения  для импульсной САУ, описываемой СДУ n-го порядка на основе МНЦ, имеет вид
для импульсной САУ, описываемой СДУ n-го порядка на основе МНЦ, имеет вид
[26]
[27]где c1=[0; 1] - постоянный вектор, определяющий компоненту вектора переменных состояния участвующую в выражении.
[28]Стробоскопическое отображение (3), линеаризованное вблизи неподвижной точки 1-цикла, может быть представлено как
[29]
[30]где k - номер итерации отображения,  - матрица монодромии стабилизируемого 1-цикла, Yk-1=Хk-1-X'.
- матрица монодромии стабилизируемого 1-цикла, Yk-1=Хk-1-X'.
[31]Размерность матрицы MD зависит от порядка системы дифференциальных уравнений, описывающих работу устройства. При этом нужно выбрать такое значение коэффициентов Ki, при котором старший мультипликатор матрицы MD принимает значение меньше единицы.
[32]Основным критерием выбора коэффициентов Ki является сходимость стробоскопического отображения (3) к устойчивой неподвижной точке (т.е. 1-цикл должен быть устойчив). Для анализа локальной устойчивости 1-цикла используется первый метод Ляпунова. Как известно, локальная устойчивость периодического решения определяется на основе мультипликаторов (ρi, где i=1…n) матрицы монодромии М*, где n - порядок системы. Как следует из выражения (2-5), мультипликаторы матрицы монодромии зависят от коэффициентов Ki.
[33]Как известно, периодический режим устойчив, когда модули все мультипликаторов находятся в пределах единичного круга на комплексной плоскости. Для рассматриваемой системы, данное условие можно записать в виде
[35]Это значит, что для устойчивости желаемого 1-цикла его старший мультипликатор должен быть меньше единицы, что требует подбора определенного значения коэффициентов Ki. Для надежной работы преобразователя введем понятие запаса устойчивости по модулю старшего мультипликатора, который рассчитывается по выражению
[37]где ρст.цел - целевое значение мультипликатора.
[38]Задачу поиска оптимальных значений коэффициентов Ki можно свести к задаче оптимизации. Целевая функция в данном случае будет иметь вид
[39]
[40]Как видно из (6) основной задачей является поиск таких значений коэффициентов Ki, при которых модуль разности между фактическим значением модуля старшего мультипликатора 1-цикла и целевым значение модуля старшего мультипликатора будет минимален.
[41]Особенности математической задачи расчета коэффициентов корректирующей функции в случае системы, описываемой двухмерным стробоскопическим отображением для начала рассматриваются для частного случая, когда Ki=K2=K.
[42]На Фиг. 2 представлен частный пример диаграммы мультипликаторов 1-цикла. На рисунке: точечная линия - зависимость модуля мультипликатора |ρ1|; штриховая линия - зависимость модуля мультипликатора |ρ2|; сплошная линия - зависимость модуля старшего мультипликатора |ρmax| - Как видно из рисунка, зависимость модуля старшего мультипликатора |ρmax| от коэффициента K является нелинейной и претерпевает разрыв в точке Kр. Так, при K<Kр модуль старшего мультипликатора |ρmax|=|ρ1|, а при K>Kp модуль старшего мультипликатора |ρmax|=|ρ2| - Очевидно, что в общем случае данная зависимость может иметь более сложный характер.
[43]В более сложном случае K1≠K2, что усложняет задачу поиска желаемых значений коэффициентов КФ. График модуля старшего мультипликатора в зависимости от коэффициентов K1 и K2 представлен на Фиг. 3, где белой точкой отмечены координаты минимума функции.
[44]В силу сложности зависимости старшего мультипликатора от указанных коэффициентов и возможности существования разрывов целевой функции данную математическую задачу можно отнести к задаче оптимизации выпуклых недифференцируемых функций. Для решения таких задач разработан целый ряд методов. Анализ показал, что в зависимости от ситуации для поиска оптимальных значений коэффициентов Ki можно применять метод Монте-Карло, субградиентные методы оптимизации, метод Нелдера-Мида и др. К недостаткам субградиентных методов оптимизации относится необходимость априорного знания значения целевой функции в точки минимума, что в данном случае невозможно. В данном случае используется метод Нелдера-Мида.
[45]Поиск минимума целевой функции (8) осуществляется на интервалах [K1mim, K1max] и [K2min, K2max] границы которых задаются эмпирически. Максимальное число итераций метода оптимизации обозначаем как Nc.
[46]Итерации продолжаются до тех пор, пока модуль старшего мультипликатора не удовлетворяет условию окончания итераций или число реализованных итераций меньше Nc. В случае, если оптимальные значения коэффициентов не были найдены, то эти коэффициенты приравниваются нулю (отказ от использования МНЦ). Отказ от использования МНЦ в случае отсутствия условий стабилизации 1-цикла с заданным запасом устойчивости приведет к наличию нежелательных динамических режимов, но стоит заметить, что здесь не решается задача полного исключения нежелательных режимов во всем диапазоне параметров системы, а обеспечивается максимально возможная площадь желаемого 1-цикла. Как показал проведенный анализ, в общем случае в системах рассматриваемого класса в определенных областях параметров системы поставленная выше математическая задача может быть неразрешима и модуль старшего мультипликатора останется больше единицы при любом значении коэффициентов корректирующей функции в допустимом диапазоне их значений.
[47]Очевидно, что расчет матрицы монодромии и поиск ее собственных значений в совокупности с методом оптимизации для поиска оптимальных значений коэффициентов Ki достаточно сложно выполнить непосредственно в цифровой системе управления в связи с высокими требованиями к вычислительным ресурсам, поэтому при микроконтроллерной реализации системы управления предлагается использовать нейронную сеть. В этом случае
[48] ,
,
[49]где функция ϕi реализуется нейронной сетью. Расчет обучающей выборки для нейронной сети осуществляется на основе рассмотренного ранее алгоритма на инструментальной ЭВМ.
[50]Было проведено математическое моделирование системы с целью проверки работоспособности алгоритма. Моделирование проводилось для системы с параметрами: L=0,1 Гн, С=1 мкФ, R=1 Ом, Rн=150 Ом, α=30, β=0,01, Upm=10 В, а=0,0001 с.
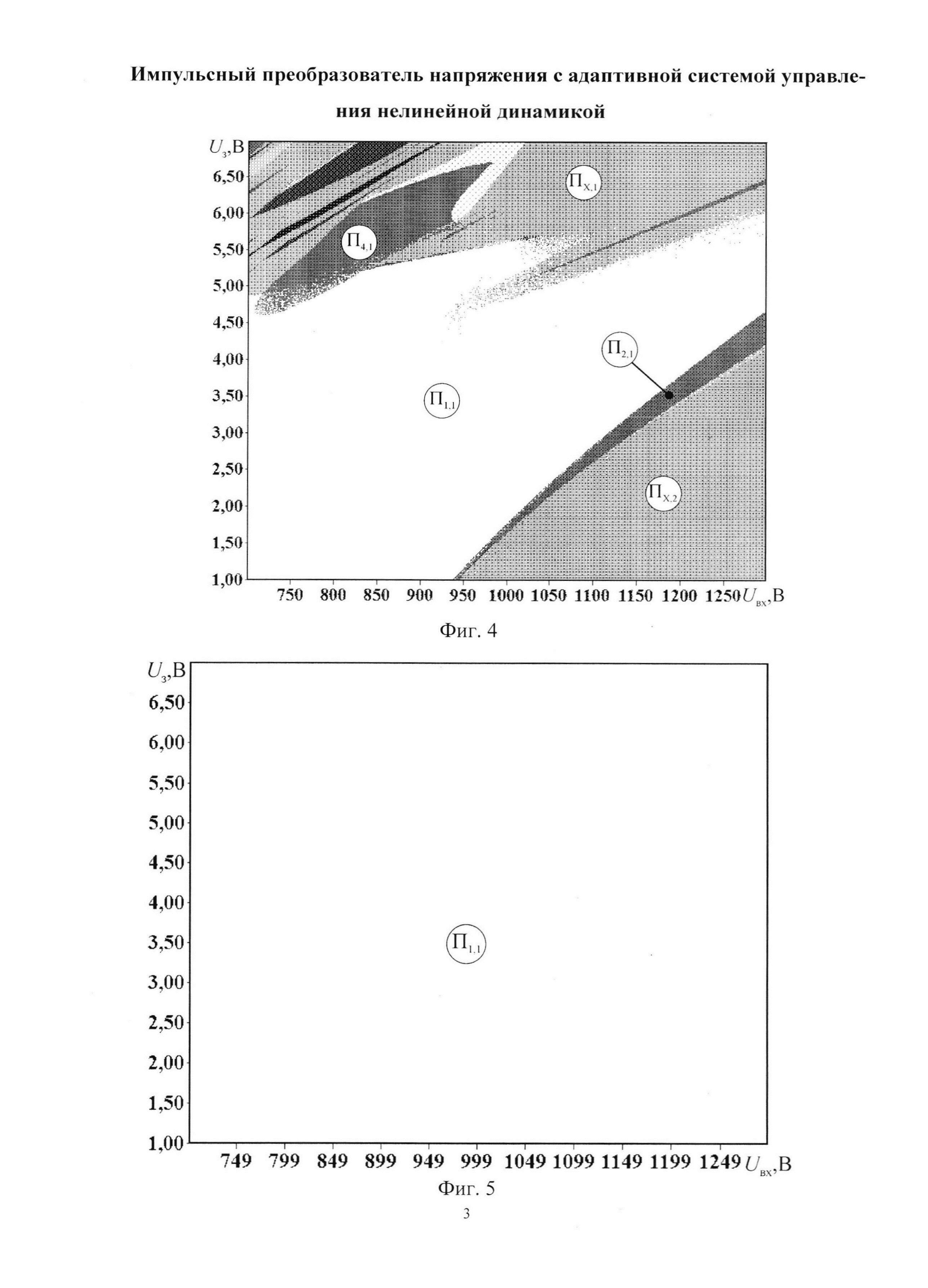
[51]На Фиг. 4 и Фиг. 5 приведены карты динамических режимов при различных условиях работы системы. На картах символами Пi,j отмечены области существования различных динамических режимов (i - m-цикл, характерный для данной области, j - номер области на карте динамических режимов). В частности, область П1,1 представляет собой первую область существования основного (проектного) режима с частотой ƒ=ƒкв (1-цикл), где ƒкв=1/а - частота квантования. Область Пх,j - соответствует недетерминированным режимам функционирования преобразователя (m→∞).
[52]Анализ Фиг. 4 показывает, что без применения МНЦ области нежелательных режимов занимают достаточно большую площадь карты динамических режимов. При больших входных напряжениях и малых задающих воздействиях в системе реализуются хаотический режим (область Пx,2). При больших задающих воздействиях во всем диапазоне входных напряжений реализуются нежелательные режимы с большой амплитудой колебаний. Площадь области 1-цикла на Фиг. 4, а составляет 52,74% от площади карты.
[53]Использование адаптации параметров K1 и K2 на основе предложенного алгоритма (параметры алгоритма адаптации: K1min=K2min=-3; K1max=K2max=3; ρст.цел=0,6, Nc=300) позволило полностью устранить области нежелательных динамических режимов, что следует из Фиг. 5 и говорит об его эффективности.


{kind=link}
{kind=link}