[1]Полезная модель относится к транспортным средствам на воздушной подушке (ТСВП) с контактным движителем и касается конструкции комбинированного лыжно-гусеничного опорно-направляющего аппарата, предназначенного для восприятия нагрузок, снижения сопротивления движению, эффективного управления траекторией движения.
[2]Известно использование транспортного средства на воздушной подушке для движения по бездорожью, содержащего корпус с бортовыми гусеничными движителями подвижных гибких боковых ограждений, а также уплотняющих воздушную подушку элементов спереди и сзади бортовых гусеничных движителей подвижных гибких ограждений, что обеспечивает движение транспортного средства без зацепления за неровности на опорной поверхности, при этом также обеспечивается большее отношение площади контакта движителей с грунтом по отношению к общей площади контакта всего гибкого ограждения с опорной поверхностью, что снижает трение сопротивления передвижению транспортного средства (RU 2114749, B60V 1/14, опубликовано: 10.07.1998). Хотя данное устройство и предназначено для перемещения по болотистой и пересеченной местности, однако в реальных условиях оно достаточно надежно может выполнять свои функции только в первом случае. Во втором оказывается сложным перемещение по пересеченной местности при наличии остроконечных выступов и ступенчатых участков, причем в таких случаях высока вероятность ее разрушения. Кроме того, увеличение площади опорной поверхности, приводит к уменьшению маневренности транспортного средства.
[3]Наиболее близким аналогом заявленной полезной модели является опорно-направляющее устройство для транспортного средства, такого как самолет, аэросани и т.п., включающее в себя корпус, в верхней части которого установлена опора шарнира для крепления опорно-направляющего устройства к упомянутому транспортному средству, а в нижней части в продольном направлении выполнены поперечные оси с установленными на них роликами и гусеничной лентой (SU 26550, В64С 25/38, опубликовано: 31.05.1932). Данное опорно-направляющее устройство является простым в изготовлении, удобным в эксплуатации, а также является очень надежным и может обеспечить легкое перемещение как по снегу так и по твердой земле без переустройства шасси. Следует отметить, что оно также может быть приспособлено для использования и на других транспортных средствах, в частности, в транспортных средствах на воздушной подушке. Однако оно не может перемещаться, например, по местности, содержащей остроконечные выступы и ступенчатые участки.
[4]Задачей полезной модели является разработка комбинированного лыжно-гусеничного опорно-направляющего аппарата, обеспечивающего движение ТСВП по различным опорным поверхностям, в том числе по сильно пересеченной местности со сложным рельефом, в том числе с остроконечными выступами и ступенчатыми участками, например, по ледяным торосам, каменистым насыпям.
[5]Техническим результатом, достигаемым при решении данной задачи, является обеспечение подвижности и управляемости ТСВП на различных опорных поверхностях со сложным рельефом местности, в том числе с остроконечными выступами и ступенчатыми участками.
[6]Технический результат достигается за счет того, что опорно-направляющий аппарат для ТСВП, включающее в себя корпус, в верхней части которого установлена опора шарнира для крепления опорно-направляющего устройства к ТСВП, а в нижней части в продольном направлении выполнены поперечные оси с установленными на них роликами и гусеничной лентой, снабжено направляющими, расположенными между роликами, при этом первая по ходу движения направляющая имеет длину не менее трех диаметров ролика и установлена так, что ее продольная ось находится под углом к линии, пересекающей оси второго и третьего по ходу движения роликов, причем оси третьего и четвертого роликов расположены ниже, чем ось второго ролика.
[7]Гусеничная лента охватывает ролики. Направляющие покрыты антифрикционным материалом.
[8]Устройство также может быть снабжено:
[9]- механизмом регулировки натяжения гусеничной ленты, закрепленным в корпусе над гусеничной лентой и содержащим натяжной ролик, контактирующий с гусеничной лентой в области между первыми по ходу движения направляющей и роликом;.
[10]- тормозным механизмом, закрепленным в корпусе над гусеничной лентой и содержащим подпружиненную тормозную колодку с возможностью осуществления торможения путем прижатия гусеничной ленты ко второй по ходу движения направляющей;
[11]- закрепленным в корпусе скребком для очистки внутренней поверхности гусеничной ленты.
[12]- закрепленной на корпусе щеткой для очистки наружной поверхности гусеничной ленты;
[13]Корпус снабжен боковыми крышками, между которыми расположены ролики и направляющие, а боковые крышки прикреплены к корпусу посредством болтов.
[14]Указанный технический результат достигается перематыванием гусеничной ленты относительно опорно-направляющего аппарата на опорную поверхность с высокими коэффициентами трения или ее скольжением вместе с опорно-направляющим аппаратом относительно опорной поверхности с низкими коэффициентами трения, в т.ч. при движении по воде.
[15]Заявляемую полезную модель иллюстрируют следующие фигуры:
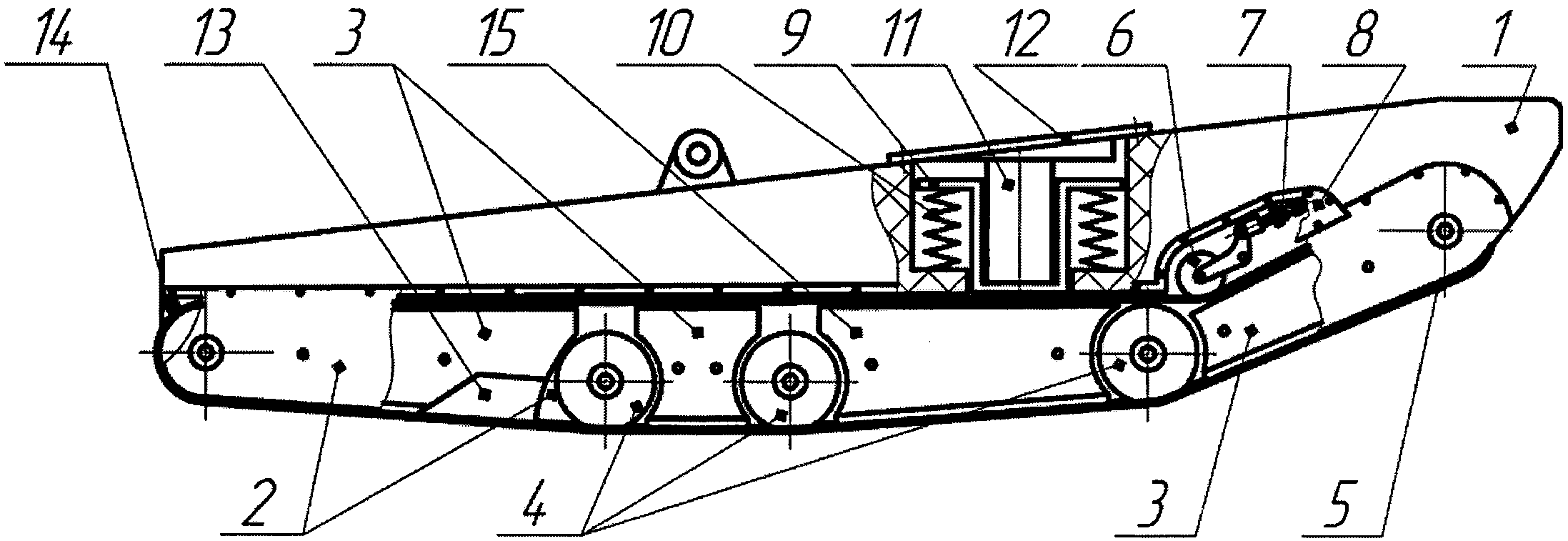
[16]Фиг. 1 - схематично показано опорно-направляющей аппарат.
[17]Фиг. 2 - схематично показаны способы движения ТСВП с помощью опорно-направляющего аппарата, и преодоления препятствия, где
[18]- на а, г, д, е - гусеничный способ движения;
[19]- на б, в - лыжный способ движения;
[20]- на в, г, д, е - движение последовательно при преодолении препятствия.
[21]Суть технического решения заключается в сочетании преимуществ гусеничного и лыжного принципов движения. Опорно-направляющий аппарат выполнен в виде шарнирно-закрепленной на ТСВП лыжи - поплавка, вся длина опорной и накатывающей части которой образована гусеничной лентой.
[22]Опорно-направляющий аппарат для транспортного средства на воздушной подушке (ТСВП) образовано корпусом-поплавком 1 (Фиг. 1), в верхней части которого установлена опора шарнира крепления к ТСВП. К поплавку 1 с обеих сторон прикрепляются на болтах боковые крышки 2. В нижней части корпуса установлены направляющие 3, 15. Кроме того, в нижней части в продольном направлении выполнены поперечные оси с установленными на них вращающимися роликами 4. Направляющие 3, 15 расположены между роликами. Первая по ходу движения направляющая 3 имеет длину не менее трех диаметров ролика и установлена так, что ее продольная ось находится под углом к линии, пересекающей оси второго и третьего по ходу движения роликов. Оси третьего и четвертого роликов расположены ниже, чем ось второго ролика. Направляющие 3, 15 и вращающиеся на осях ролики 4 расположены между боковыми крышками. На направляющие ролики 4 надевается гусеничная лента 5, натяжение которой обеспечивается натяжным роликом 6 и натяжным механизмом 7. Для удобства регулировки натяжения доступ к натяжному механизму обеспечивается через крышку механизма натяжения 8. При движении по ровным поверхностям гусеничная лента проворачивается на направляющих роликах 4. При движении по неровным ОП под воздействием неровностей гусеничная лента деформируется и скользит по наружным поверхностям направляющих 3, 15 покрытым антифрикционным материалом. Для блокировки гусеничной ленты от проворачивания (при торможении ТСВП и удерживании его на стоянке) в корпусе-поплавке размещена тормозная колодка 9, удерживаемая в расторможенном положении пружинами 10. Торможение осуществляется при разжатии механизма торможения 11 (устройство не показано) между колодкой 9 и крышкой 12. При этом колодка прижимает гусеничную ленту к направляющей 15, блокируя ее вращение. Очистка внутренней поверхности гусеничной ленты от загрязнений обеспечивается скребком 13, смещающим грязь с центральной части ленты на периферию, далее наружу через окна в боковых крышках. Наружная поверхность гусеничной ленты очищается щеткой 14, закрепленной на корпусе-поплавке.
[23]ТСВП, на котором предполагается использование заявленного комбинированного опорно-направляющего устройства, является транспортным средством - амфибией, передвигающимся на воздушной подушке, создаваемой за счет нагнетания воздуха в специально огражденную зону под днищем корпуса. В качестве движителя, создающего силу тяги для горизонтального перемещения ТСВП по опорной поверхности, используется воздушный винт.
[24]На твердых опорных поверхностях, например, асфальто-бетонных покрытиях с хорошим сцеплением в контакте гусеницы с ОП движение ТСВП осуществляется в результате перематывания ленты гусеницы (гусеничный способ движения Фиг. 2 а). Поперечные силы, возникающие в контакте гусеницы с ОП, обеспечивают высокую управляемость ТСВП. Для снижения момента сопротивления повороту опорная часть гусеничной ленты выполнена трапецеидальной формы.
[25]Движение на скользких, водонасыщенных грунтах возможно как в результате перематывания ленты гусеницы, так и в результате ее скольжения относительно ОП в результате снижения коэффициента трения (лыжный способ движения на фиг. 2 б). Поперечные силы, обеспечивающие управляемость ТСВП возникают в контакте протяженной боковой кромки полотна гусеницы и боковой поверхности лыжи с ОП (слабонесущие грунты, снежный покров, вода) или за счет взаимодействия кромки гусеницы с неровностями ОП (ледяной покров).
[26]Преодоление препятствий, движение по крупным неровностям (ледяным торосам, каменистым насыпям) осуществляется за счет наезда и подъема носовой части опорно-направляющего аппарата на препятствие за счет силы тяги воздушного винта, и скольжения по препятствию до момента входа в контакт гусеничной ленты (фиг. 2. в). Далее наезд на препятствие и движение по препятствию осуществляется за счет перематывания гусеничной ленты (Фиг. 2. г, д, е).
[27]Таким образом, заявленное комбинированное лыжно-гусеничное опорно-направляющий аппарат в контакте с, частично нагруженное силой веса ТСВП (режим частичной разгрузки) обеспечивает восприятие вертикальных и поперечных усилий, обеспечивая ТСВП высокую подвижность и управляемость по различным видам опорной поверхности.