со О
О
ел
00
00
Изобретение относится к радиотехнике
и может быть использовано для фильтрации результатов измерений физического параметра ,
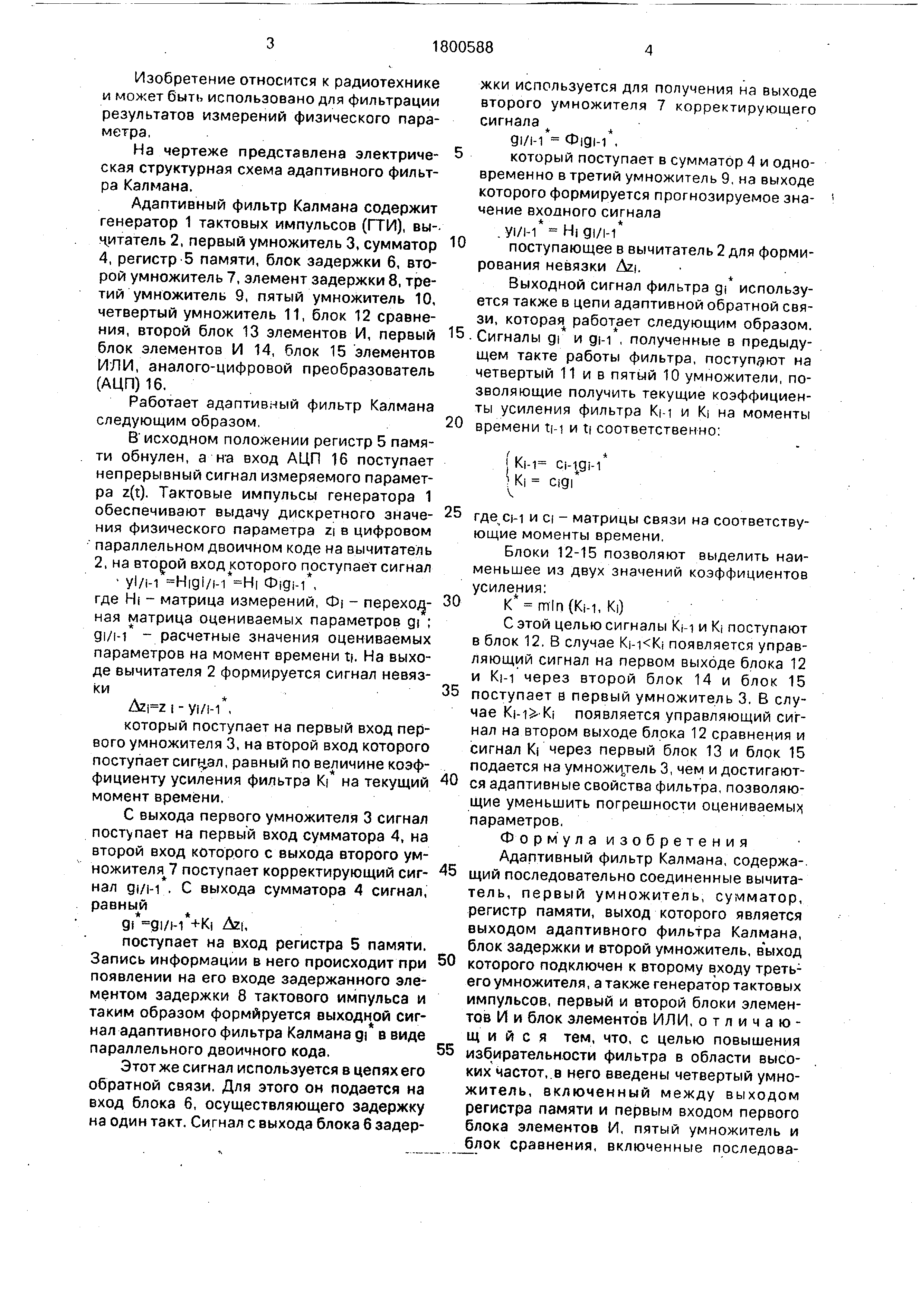
На чертеже представлена электрическая структурная схема адаптивного фильтра Калмана.
Адаптивный фильтр Калмана содержит генератор 1 тактовых импульсов (ГТИ), вы-,
читатель 2, первый умножитель 3, сумматор 4, регистр 5 памяти, блок задержки 6, второй
умножитель 7, элемент задержки 8, третий умножитель 9, пятый умножитель 10,
четвертый умножитель 11, блок 12 сравнения , второй блок 13 элементов И, первый
блок элементов И 14, блок 15 элементов ИЛИ, аналого-цифровой преобразователь (АЦП)16.
Работает адаптивный фильтр Калмана следующим образом,
В исходном положении регистр 5 памяти обнулен, а нв вход АЦП 16 поступает
непрерывный сигнал измеряемого параметра z(t). Тактовые импульсы генератора 1
обеспечивают выдачу дискретного значения физического параметра г в цифровом
параллельном двоичном коде на вычитатель 2, на второй вход которого поступает сигнал
yl/i-1 Higi/i-i Hi Ф|д|-Г, где Hi - матрица измерений, Ф| - переходная
матрица оцениваемых параметров gi ; 91/1-1 - расчетные значения оцениваемых
параметров на момент времени ti. На выходе вычитателя 2 формируется сигнал невязки
i-yi/и,
который поступает на первый вход первого
умножителя 3, на второй вход которого поступает сигнал, равный по величине коэффициенту
усиления фильтра К| на текущий момент времени,
С выхода первого умножителя 3 сигнал поступает на первый вход сумматора 4, на
второй вход которого с выхода второго умножителя 7 поступает корректирующий сигнал
gi/i-Г. С выхода сумматора 4 сигнал, равный
9i gi/i-1 +Ki Дгг,
поступает на вход регистра 5 памяти. Запись информации в него происходит при
появлении на его входе задержанного элементом задержки 8 тактового импульса и
таким образом формируется выходной сигнал адаптивного фильтра Калмана gi в виде
параллельного двоичного кода.
Этот же сигнал используется в цепях его
обратной связи. Для этого он подается на вход блока 6, осуществляющего задержку
на один такт. Сигнал с выхода блока б задержки используется для получения на выходе
второго умножителя 7 корректирующего сигнала
gi/i-i Ф|дм,
который поступает в сумматор 4 и одновременно в третий умножитель 9, на выходе
которого формируется прогнозируемое значение входного сигнала . У1/и Н|д|/|-Г
поступающее в вычитатель 2 для формирования невязки Azi.
Выходной сигнал фильтра gi используется также в цепи адаптивной обратной связи
, которая работает следующим образом.
Сигналы gi и дм , полученные в предыдущем
такте работы фильтра, поступают на четвертый 11 и в пятый 10 умножители, позволяющие
получить текущие коэффициенты усиления фильтра Км и К| на моменты
времени ti-i и ti соответственно:
|Км ci-p-1 Ki cigi
и ci - матрицы связи на соответствующие моменты времени.
Блоки 12-15 позволяют выделить наименьшее из двух значений коэффициентов усиления:
К т1п(Ки, Ki)
С этой целью сигналы Ки и Ki поступают
в блок 12. В случае появляется управляющий сигнал на первом выходе блока 12
и KI-I через второй блок 14 и блок 15
поступает в первый умножитель 3. В случае
появляется управляющий сигнал на втором выходе блока 12 сравнения и
сигнал Ki через первый блок 13 и блок 15 подается на умножи/ель 3, чем и достигаются
адаптивные свойства фильтра, позволяющие уменьшить погрешности оцениваемых параметров.
Фор мула изобретения Адаптивный фильтр Калмана, содержащий
последовательно соединенные вычитатель , первый умножитель, сумматор,
регистр памяти, выход которого является выходом адаптивного фильтра Калмана,
блок задержки и второй умножитель, в ыход
которого подключен к второму входу третьего
умножителя, а также генератор тактовых импульсов, первый и второй блоки элементов
И и блок элементов ИЛИ, отличающийся тем, что, с целью повышения
избирательности фильтра в области высоких частот,.в него введены четвертый умножитель
, включенный между выходом регистра памяти и первым входом первого
блока элементов И, пятый умножитель и блок сравнения, включенные последова
тельно между выходом блока задержки ивычитэтеля подключен к выходу третьего
вторым входом первого блока элементов И,умножителя, выход первого блока эпеменэлемент
задержки, включенный между вы-тов И подключен через блок элементов ИЛИ
ходом генератора тактовых импульсов и к второму входу первого умножителя, выход
входом записи регистра памяти, и аналоге-5 четвертого умножителя соединен с вторым
цифровой преобразователь, включенныйвходом блока сравнения, второй выход комежду выходом генератора тактовых им-торого подключен к первому входу второго
пульсов и первым входом вычитателя, приблока элементов И, второй вход которого
этом информационный вход аналого-циф-соединен с выходом пятого умножителя, а
рового преобразователя является выходом10 выход - с вторым входом блока элементов
адаптивного фильтра Калмана, второй входИЛИ.