[1]Изобретение относится к промышленному
транспорту, а именно к вертикальным конвейерам для штучных грузов.
[2]Цель изобретения - повышение надежности работы конвейера.
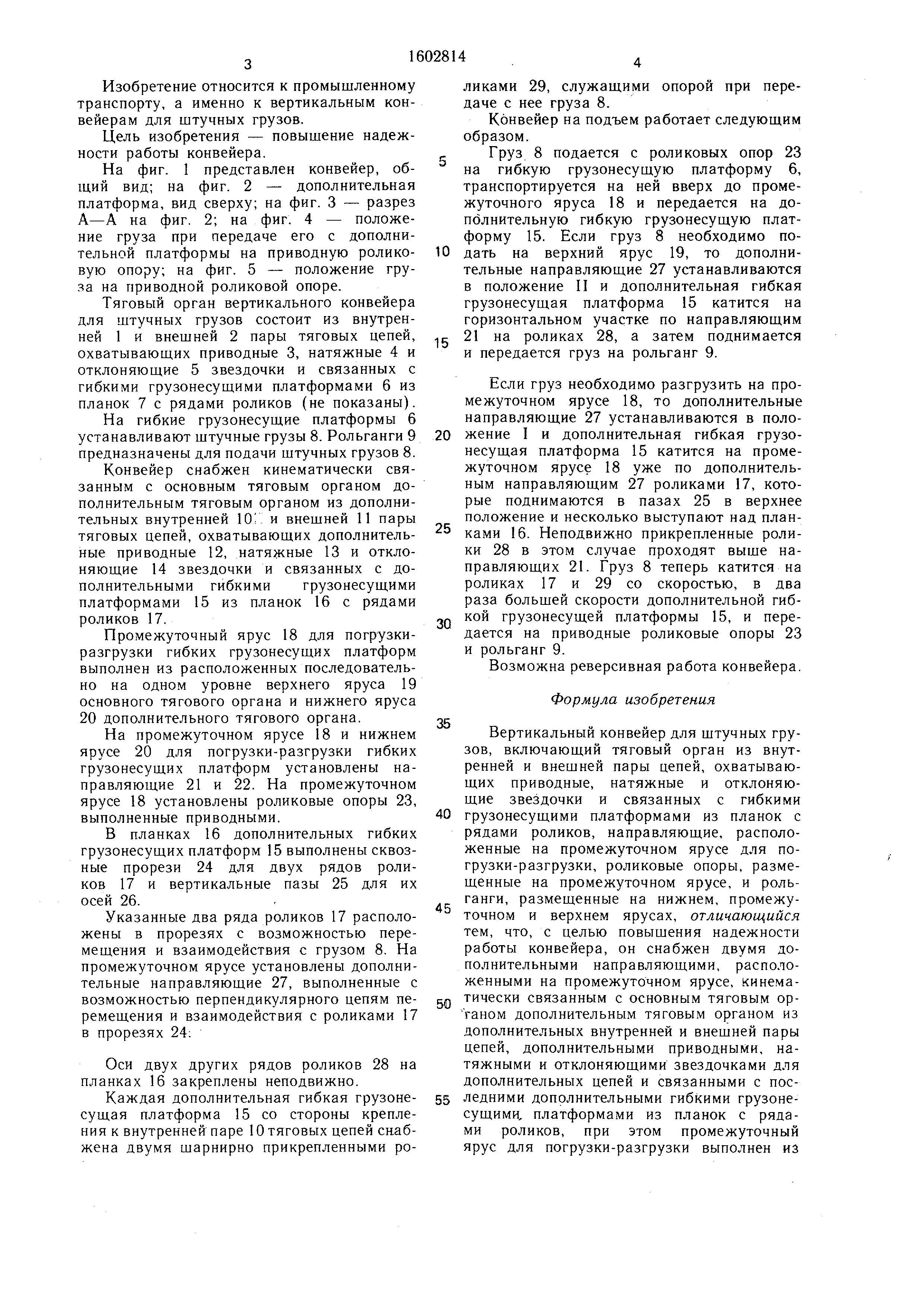
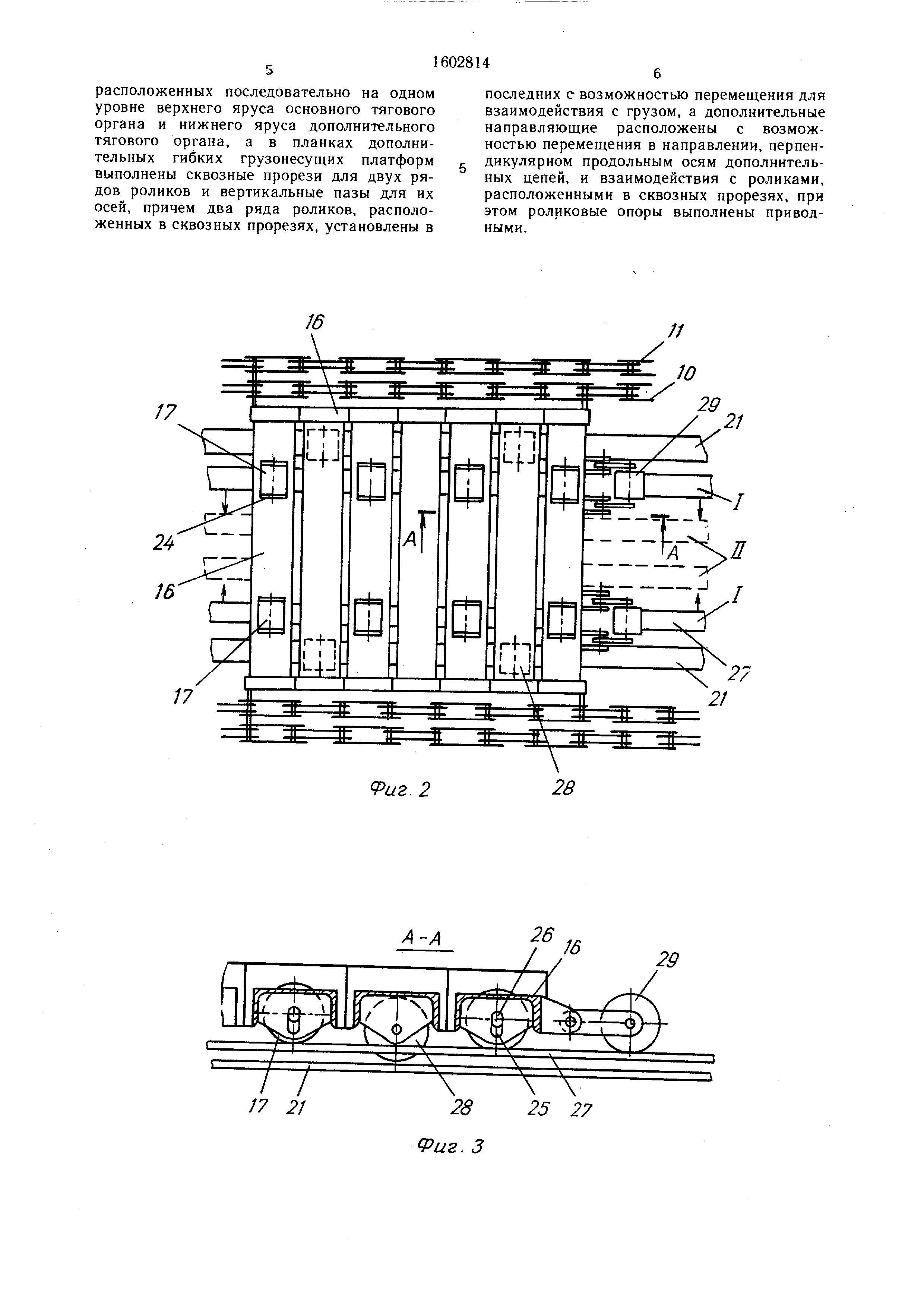
[3]На фиг. 1 представлен конвейер, общий вид; на фиг. 2 - дополнительная
платформа, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - положение
груза при передаче его с дополнительной платформы на приводную роликовую опору; на фиг. 5 - положение груза
на приводной роликовой опоре.
[4]Тяговый орган вертикального конвейера
для штучных грузов состоит из внутренней 1 и внешней 2 пары тяговых цепей,
охватываюших приводные 3, натяжные 4 и отклоняюш,ие 5 звездочки и связанных с
гибкими грузонесушими платформами 6 из планок 7 с рядами роликов (не показаны).
[5]На гибкие грузонесушие платформы 6 устанавливают штучные грузы 8. Рольганги 9
предназначены для подачи штучных грузов 8.
[6]Конвейер снабжен кинематически связанным
с основным тяговым органом дополнительным тяговым органом из дополнительных
внутренней 10 и внешней 11 пары
[9]ликами 29, служаш.ими опорой при передаче с нее груза 8.
[10]Конвейер на подъем работает следуюш,им образом.
[11]Груз 8 подается с роликовых опор 23
на гибкую грузонесущую платформу 6, транспортируется на ней вверх до промежуточного
яруса 18 и передается на дополнительную гибкую грузонесущую платформу 15. Если груз 8 необходимо подать
на верхний ярус 19, то дополнительные направляющие 27 устанавливаются
в положение II и дополнительная гибкая грузонесущая платформа 15 катится на
горизонтальном участке по направляющим 21 на роликах 28, а затем поднимается
и передается груз на рольганг 9.
[12]Если груз необходимо разгрузить на промежуточном
ярусе 18, то дополнительные направляющие 27 устанавливаются в поло-
20 жение I и дополнительная гибкая грузонесущая платформа 15 катится на промежуточном
ярусе 18 уже по дополнительным направляющим 27 роликами 17, которые поднимаются в пазах 25 в верхнее
положение и несколько выступают над плантяговых цепей, охватывающих дополнитель- ками 16. Неподвижно прикрепленные ролики 28 в этом случае проходят выше направляющих
21. Груз 8 теперь катится на роликах 17 и 29 со скоростью, в два
раза больщей скорости дополнительной гибкой грузонесущей платформы 15, и передается
на приводные роликовые опоры 23 и рольганг 9.
[13]ные приводные 12, натяжные 13 и отклоняющие 14 звездочки и связанных с дополнительными
гибкими грузонесущими платформами 15 из планок 16 с рядами роликов 17.
[14]Промежуточный ярус 18 для погрузки- разгрузки гибких грузонесущих платформ
выполнен из расположенных последовательно на одном уровне верхнего яруса 19
основного тягового органа и нижнего яруса 20 дополнительного тягового органа.
[15]На промежуточном ярусе 18 и нижнем ярусе 20 для погрузки-разгрузки гибких
грузонесущих платформ установлены направляющие 21 и 22. На промежуточном
ярусе 18 установлены роликовые опоры 23, выполненные приводными.
[16]В планках 16 дополнительных гибких грузонесущих платформ 15 выполнены сквозные
прорези 24 для двух рядов роликов 17 и вертикальные пазы 25 для их осей 26.
[17]Указанные два ряда роликов 17 расположены в прорезях с возможностью перемещения
и взаимодействия с грузом 8. На промежуточном ярусе установлены дополнительные
направляющие 27, выполненные с возможностью перпендикулярного цепям перемещения
и взаимодействия с роликами 17 в прорезях 24;
[18]Оси двух других рядов роликов 28 на
планках 16 закреплены неподвижно.
[20]ки 28 в этом случае проходят выше направляющих 21. Груз 8 теперь катится на
роликах 17 и 29 со скоростью, в два раза больщей скорости дополнительной гибкой
грузонесущей платформы 15, и передается на приводные роликовые опоры 23 и рольганг 9.
[21]Возможна реверсивная работа конвейера.
[24]Вертикальный конвейер для штучных грузов , включающий тяговый орган из внутренней
и внещней пары цепей, охватывающих приводные, натяжные и отклоняющие звездочки и связанных с гибкими
40 грузонесущими платформами из планок с рядами роликов, направляющие, расположенные
на промежуточном ярусе для погрузки-разгрузки , роликовые опоры, размещенные
на промежуточном ярусе, и рольганги , размещенные на нижнем, промежуточном
и верхнем ярусах, отличающийся тем, что, с целью повышения надежности
работы конвейера, он снабжен двумя дополнительными направляющими, расположенными
на промежуточном ярусе, .кинематически связанным с основным тяговым органом
дополнительным тяговым органом из дополнительных внутренней и внешней пары
цепей, дополнительными приводными, натяжными и отклоняющими звездочками для
дополнительных цепей и связанными с пос45
[26]Каждая дополнительная гибкая грузоне- 55 ледними дополнительными гибкими грузонесущая платформа 15 со стороны крепления
к внутренней паре 10 тяговых цепей снабжена двумя шарнирно прикрепленными росущими , платформами из планок с рядами роликов, при этом промежуточный
ярус для погрузки-разгрузки выполнен из
[27]ликами 29, служаш.ими опорой при передаче
с нее груза 8.
[28]Конвейер на подъем работает следуюш,им образом.
[29]Груз 8 подается с роликовых опор 23 на гибкую грузонесущую платформу 6,
транспортируется на ней вверх до промежуточного яруса 18 и передается на дополнительную
гибкую грузонесущую платформу 15. Если груз 8 необходимо подать на верхний ярус 19, то дополнительные
направляющие 27 устанавливаются в положение II и дополнительная гибкая
грузонесущая платформа 15 катится на горизонтальном участке по направляющим
21 на роликах 28, а затем поднимается и передается груз на рольганг 9.
[30]Если груз необходимо разгрузить на промежуточном ярусе 18, то дополнительные
направляющие 27 устанавливаются в поло- жение I и дополнительная гибкая грузонесущая
платформа 15 катится на промежуточном ярусе 18 уже по дополнительным
направляющим 27 роликами 17, которые поднимаются в пазах 25 в верхнее
положение и несколько выступают над планками 16. Неподвижно прикрепленные роликами
16. Неподвижно прикрепленные роли
[31]ки 28 в этом случае проходят выше направляющих
21. Груз 8 теперь катится на роликах 17 и 29 со скоростью, в два
раза больщей скорости дополнительной гибкой грузонесущей платформы 15, и передается
на приводные роликовые опоры 23 и рольганг 9.
[32]Возможна реверсивная работа конвейера.
[35]Вертикальный конвейер для штучных грузов , включающий тяговый орган из внутренней
и внещней пары цепей, охватывающих приводные, натяжные и отклоняющие звездочки и связанных с гибкими
0 грузонесущими платформами из планок с рядами роликов, направляющие, расположенные
на промежуточном ярусе для погрузки-разгрузки , роликовые опоры, размещенные
на промежуточном ярусе, и рольганги , размещенные на нижнем, промежуточном
и верхнем ярусах, отличающийся тем, что, с целью повышения надежности
работы конвейера, он снабжен двумя дополнительными направляющими, расположенными
на промежуточном ярусе, .кинематически связанным с основным тяговым органом
дополнительным тяговым органом из дополнительных внутренней и внешней пары
цепей, дополнительными приводными, натяжными и отклоняющими звездочками для
дополнительных цепей и связанными с пос5
[37]сущими, платформами из планок с рядами роликов, при этом промежуточный
ярус для погрузки-разгрузки выполнен из
[38]расположенных последовательно на одном уровне верхнего яруса основного тягового
органа и нижнего яруса дополнительного тягового органа, а в планках дополнительных
гибких грузонесущих платформ выполнены сквозные прорези для двух рядов роликов и вертикальные пазы для их
осей, причем два ряда роликов, расположенных в сквозных прорезях, установлены в
[39]последних с возможностью перемещения для взаимодействия с грузом, а дополнительные
направляющие расположены с возможностью перемещения в направлении, перпендикулярном
продольным осям дополнительных цепей, и взаимодействия с роликами,
расположенными в сквозных прорезях, при этом роликовые опоры выполнены приводными .