[2]Изобретение относится к области магнитных измерений, в частности -
к устройствам для определения статических магнитных характеристик ферромагнитных материалов, и может быть
использовано при неразрушающем контроле их качества.
[3]Целью изобретения является повышение
точности измерений.
[4]На фиг. 1 изображена структурная схема устройства; на фиг. 2 - диаграммы
, поясняющие принцип его работы .
[5]Устройство для исследования харак-
теристик ферромагнитных материалов содержит блок 1 намагничивания с
испытуемым образцом 2, блок 3 управления , выход которого соединен с входом
блока 1 намагничивания, после- довательно соединенные индукционный
датчик 4 блока 1 намагничивания, первый усилитель 5, интегратор 6, инвертирующий усилитель 7 (ИУ), выход
которого соединен с третьим входом суммирующего усилителя 8 (СУ), при
этом выход первого усилителя 5 соединен с входом блока 3 управления, а выход интегратора 6 соединен с
первыми входами первого 9 и второго
[6]10запоминающих устройств (ЗУ), выходы
которых соединены с первым и вторым входами СУ 8 соответственно, последовательно соединенные датчик
[7]11напряженности магнитного поля бло ка 1 намагничивания и второй усилитель
12, выход которого соединен с входами первого ключа 13 и нуль-
органа 14, двухкоординатный регистрирующий прибор 15, входы которого соединены соответственно с выходами
первого 13 и второго 16 ключей, а вход второго ключа 16 соединен с выходом
СУ 8, последовательно соединенные второй суммирующий усилитель
[8]17,второй инвертирующий усилитель
[9]18,третий ключ 19 и второй интегратор
20, выход которого соединен с четвертым входом СУ 8, при этом выход третьего ключа 19 соединен с
пятым входом СУ 8, третье запоминающее устройство 21, первый вход которого
соединен с выходом ИУ 7, а выход соединен с первым входом второго
[10]СУ 8, второй вход которого соединен с выходом первого ЗУ 9, блок 22 распределителя
импульсов, вход которого соединен с выходом нуль-органа, а первый, второй, третий выходы соеди762
[11]нены соответственно с вторым входом первого ЗУ 9, с вторым входом второг
ЗУ 10, с вторым входом третьего ЗУ 21, третий вход блока 22 распределителя
импульсов соединены с управляющими входами первого 13, второго 16 и третьего ключей 19 и отключающим
входом нуль-органа 14.
[12]Устройство работает следующим образом .
[13]Пусть начальное состояние характеризуется величиной индукции В0 (точка А на фиг. 2, где пунктирная
линия соответствует кривой, которая фиксировалась бы регистрирующим прибором
, если бы ключи 13 и 16 были включены в начальный момент (времени ). Пусть также интегратор 6 имеет
дрейф, что вызывает ошибку ДВ на выходе устройства, равную
[15]где k - коэффициент пропорциональности , t - время.
[16]Блок 3 формирует требуемый закон перемагничивания образца 2, датчики
4 и И выдают сигналы, пропорциональные соответственно скорости изменения
магнитной индукции В и напряженности магнитного поля Н, которые
усиливаются усилителями 5 и 12. Сигнал датчика 4 после усиления интегрируется интегратором 6.
[17]При увеличении напряженности намагничивающего поля от нулевого значения
до максимального (+Н ) и затем
[19]уменьшении ее до нуля, состояние
образца 2, которое фиксировалось регистрирующим прибором, будет изменяться
по траектории А-Б-С (фиг.2). В точке С нуль-орган 14 выдает импульс , который пройдет на первый
выход блока 22 распределителя импульсов и включит первое ЗУ 9, которое
измерит и запомнит уровень напряжения с интегратора 6. Это напряжение
будет пропорционально расстоянию по оси В от точки А до точки С (фиг.2). т.е. величине
[21]где Вг - остаточная индукция (координата точки С);
Т - период перемагничивания. При дальнейшем перемагничивании, т.е. при измерении намагничивающего
поля от 0 до значения (-Нт) и снова
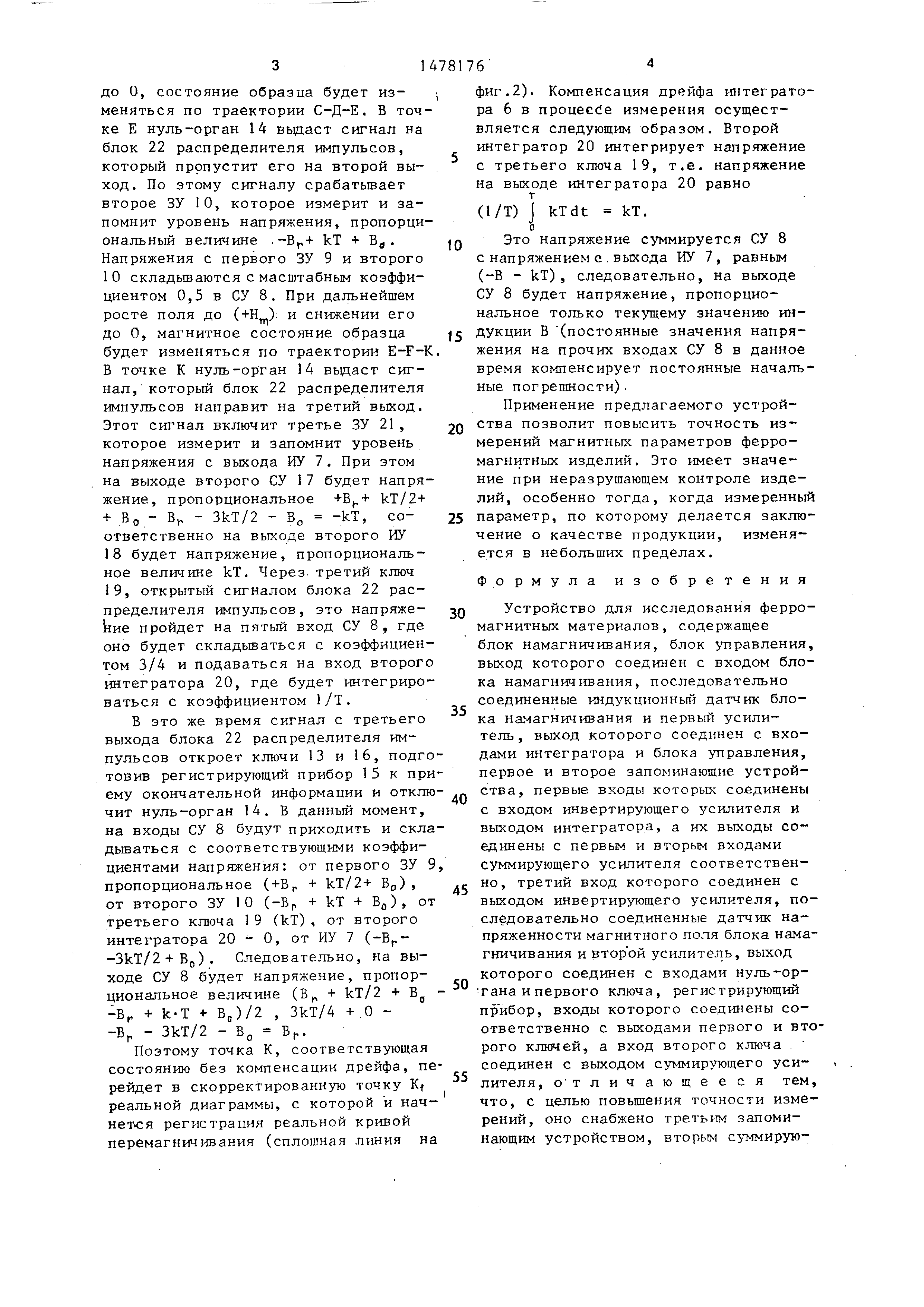
[22]до 0, состояние образца будет изменяться по траектории С-Д-Е. В точке Е нуль-орган 14 выдаст сигнал на
блок 22 распределителя импульсов, который пропустит его на второй выход . По этому сигналу срабатьюает
второе ЗУ 10, которое измерит и запомнит уровень напряжения, пропорциональный величине -В + kT + Bd.
Напряжения с первого ЗУ 9 и второго 10 складываются с масштабным коэффициентом 0,5 в СУ 8. При дальнейшем
росте поля до (+Н ) и снижении его до 0, магнитное состояние образца будет изменяться по траектории E-F-K.
В точке К нуль-орган 14 выдаст сигнал , который блок 22 распределителя
импульсов направит на третий выход. Этот сигнал включит третье ЗУ 21, которое измерит и запомнит уровень
напряжения с выхода ИУ 7. При этом на выходе второго СУ 17 будет напряжение
, пропорциональное +Bu+ kT/2+
[23]+ В0 Bv , - 3kT/2 - В -kT, co
[24]ответственно на выходе второго ИУ 18 будет напряжение, пропорциональное величине kT. Через третий ключ
19, открытый сигналом блока 22 распределителя импульсов, это напряжение пройдет на пятый вход СУ 8 , где
оно будет складываться с коэффициентом 3/4 и подаваться на вход второго
интегратора 20, где будет интегрироваться с коэффициентом 1/Т.
[25]В это же время сигнал с третьего выхода блока 22 распределителя импульсов
откроет ключи 13 и 16, подготовив регистрирующий прибор 15 к приему окончательной информации и отклю
чит нуль-орган 14. В данный момент, на входы СУ 8 будут приходить и складываться
с соответствующими коэффициентами напряжения: от первого ЗУ 9 пропорциональное (+ВГ + kT/2+ В0) ,
[26]от второго ЗУ 10 (-Бр + kT + В0), от третьего ключа 19 (kT), от второго
интегратора 20 - 0, от ИУ 7 (-Вг- -3kT/2 + B0). Следовательно, на выходе
СУ 8 будет напряжение, пропорциональное величине (В„ + kT/2 + В
[28]+ 0 -Br + k-T + В„)/2
-Вг - 3kT/2 - В0 ог
[29]Поэтому точка К, соответствующая
состоянию без компенсации дрейфа, перейдет в скорректированную точку Kf
реальной диаграммы, с которой и начнется регистрация реальной кривой перемагничивания (сплошная пиния на
[40]фиг.2). Компенсация дрейфа интегратора 6 в npoueccie измерения осуществляется
следующим образом. Второй интегратор 20 интегрирует напряжение с третьего ключа 19, т.е. напряжение
[41]на выходе интегратора 20 равно
[44]Это напряжение суммируется СУ 8 с напряжением с выхода ИУ 7, равным
(-В - kT), следовательно, на выходе СУ 8 будет напряжение, пропорциональное
только текущему значению индукции В (постоянные значения напряжения на прочих входах СУ 8 в данное
время компенсирует постоянные начальные погрешности).
[45]Применение предлагаемого устройства позволит повысить точность измерений
магнитных параметров ферромагнитных изделий. Это имеет значение при неразрушающем контроле изделий
, особенно тогда, когда измеренный параметр, по которому делается заключение
о качестве продукции, изменяется в небольших пределах.
[47]Устройство для исследования ферромагнитных материалов, содержащее
блок намагничивания, блок управления, выход которого соединен с входом блока
намагничивания, последовательно соединенные индукционный датчик блока
намагничивания и первый усилитель , выход которого соединен с входами интегратора и блока управления,
первое и второе запоминающие устройства , первые входы которых соединены
с входом инвертирующего усилителя и выходом интегратора, а их выходы соединены
с первым и вторым входами суммирующего усилителя соответственно , третий вход которого соединен с
выходом инвертирующего усилителя, последовательно соединенные датчик напряженности
магнитного поля блока намагничивания и второй усилитель, выход которого соединен с входами нуль-ор-
танаи первого ключа, регистрирующий прибор, входы которого соединены соответственно
с выходами первого и второго ключей, а вход второго ключа соединен с выходом суммирующего усилителя
, отличающееся тем, что, с целью повышения точности измерений , оно снабжено третьим запоминающим
устройством, вторым суммирую514
[48]щим усилителем, вторым инвертирующим
усилителем, третьим ключом, вторым интегратором и блоком распределителя импульсов, при этом второй сумми--
руютций усилитель, второй инвертирующий усилитель, третий ключ и второй
интегратор соединены последовательно, выход второго интегратора соединен
с четвертым входом суммирующего уси- лителя, пятый вход которого соединен
с выходом третьего ключа, первый вход третьего запоминающего устройства соединен с выходом инвертирующего
усилителя, а выход третьего запоми- нающего устройства соединен с первым
входом второго суммирующего усили766
[49]теля, второй вход которого соединен
с выходом первого запоминающего устройства , вход блока распределителя
импульсов соединен с выходом нуль- органа, первый выход блока распределителя импульсов соединен с вторым
входом первого запоминающего устройства , второй выход блока распределителя
импульсов соединен с вторым входом второго запоминающего устройства
, а третий выход блока распределителя импульсов соединен с вторым входом
третьего запоминающего устройства , с управляющими входами первого,
второго, третьего ключей и управляющим входом нуль-органа.