[1]Изобретение относится к роботам-манипуляторам с платформенными механизмами параллельной структуры и может найти в многопозиционных обрабатывающих центрах, сборочных автоматических линиях, устройствах для объемной обработки внутренних поверхностей крупногабаритных деталей и очистки трубопроводов.
[2]Известен пространственный манипулятор, содержащий стойку и подвижную платформу с одним рабочим органом, соединенную со стойкой посредством шести раздвижных опорных ног, двенадцати сложных сферических шарниров с пересекающимися осями вращения и шести приводных двигателей (книга Вульфсон И.И. и др. «Механика машин»), Москва: Высшая школа, 1996, стр. 28, рис. 1.20, схема «Платформа Стюарта») - аналог №1.
[3]Недостатками данного манипулятора являются сложность конструкции и системы управления из-за связанной кинематики всех шести приводных двигателей и ограниченное рабочее пространство.
[4]Также известен пространственный платформенный манипулятор, кинематическая цепь которого содержит стойку, соединенную с подвижной платформой с одним рабочим органом через сложные сферические шарниры с пересекающимися осями вращения и три приводных двигателя с непараллельными осями вращения (статья Мирзаев Р.А., Смирнов Н.А. «Исследование кинематики манипулятора параллельной структуры (дельта-механизм) »/Вестник Сибирского госуд. Ун-та, 2012, Вып. 4, с. 46-50, рис. 1) - аналог №2.
[5]Недостатками известного пространственного механизма манипулятора являются сложность конструкции, большие габариты и ограниченная до нуля узким конусом рабочая зона из-за малого числа степеней свободы (W=3) привода только с одним рабочим органом (график на рис. 4 в указанной статье Мирзаева Р.А / Вестник СГАУ, Вып. 4), а также неприменимость в групповых технологиях с несколькими рабочими органами.
[6]Наиболее близким по своей сущности и достигаемому эффекту к предлагаемому изобретению является пространственный шарнирный манипулятор с тремя степенями свободы (W=3), содержащий стойку и приводную платформу, выполненные с пересекающимися в одной плоскости осями шарниров и соединенные между собой через три сложных двухподвижных шарнирных четырехзвенника со взаимно-перпендикулярными осями шарниров (United States Patent No.4976582, 1990 - Clavel R.Device for the movement and positioning of an element in space.) - прототип.
[7]Недостатками указанного пространственного манипулятора являются:
[8]1) Сложность конструкции и высокая трудоемкость изготовления шарниров с точно пересекающимися осями вращения.
[9]2) Возникающий при движении угловой перекос платформы с рабочим органом.
[10]3) Большие пространственные габариты.
[11]4) Ограниченное рабочее пространство из-за малого числа степеней свободы платформы только с одним рабочим органом и возникающих ее неуправляемых и мертвых особых положений.
[12]5) Ограниченные функциональные возможности манипулятора с одним рабочим органом исключают его применение для групповых технологий с одновременным приводом разных нескольких рабочих органов.
[13]В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции, увеличении числа степеней свободы и рабочего пространства манипулятора, обеспечении постоянства ориентации нескольких разных рабочих органов и возможности применения манипулятора для групповых технологий.
[14]Получение технического результата достигается за счет того, что в кинематическую цепь механизма манипулятора введено связанное со стойкой дополнительное звено, представляющее собой подвижное опорное основание, выполненное в виде пустотелой многогранной призмы, на боковых гранях которой установлены структурные модули, каждый из которых выполнен в виде подвижной платформы с отдельным рабочим органом, соединенной с одной из боковых граней призмы через двойной шарнирный параллелограмм с приводом, размещенным внутри этой пустотелой призмы.
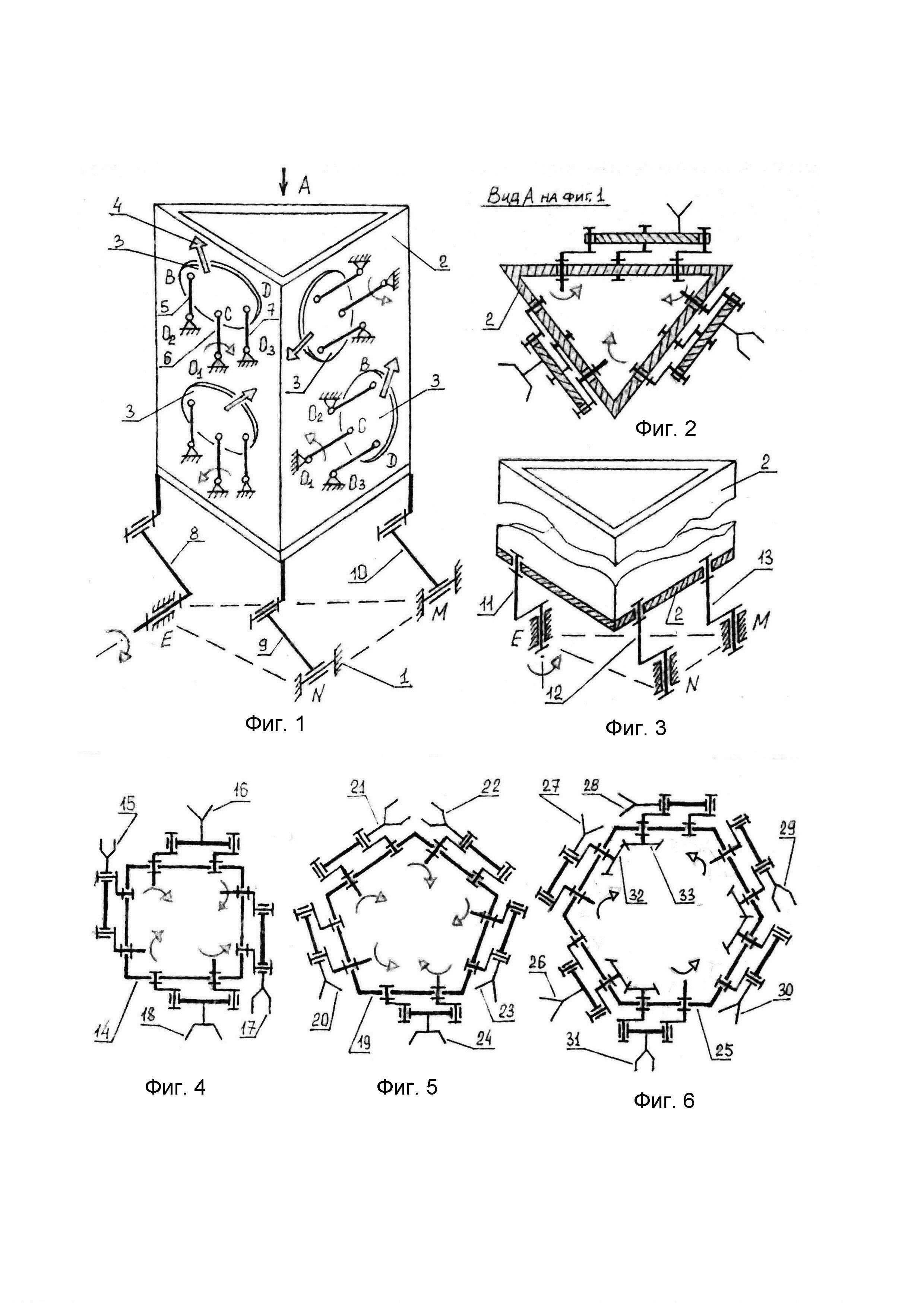
[15]Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2 (вид А на фиг. 1), фиг. 3, фиг. 4, фиг. 5, фиг. 6.
[16]На фиг. 1 и фиг. 2 представлен общий вид пространственного параллелограммного механизма манипулятора-трипода, в котором в кинематическую цепь механизма введено связанное со стойкой 1 дополнительное звено, представляющее собой подвижное опорное основание, выполненное в виде пустотелой треугольной призмы 2, на трех боковых гранях который установлены структурные модули, каждый из которых выполнен в виде подвижной платформы 3 с отдельным рабочим органом 4, шарнирно соединенной с одной из боковых граней призмы 2 через три кривошипных или коромысловых рычага 5, 6 и 7 одинаковой длины O1C=O2B=O3D, образующих между собой двойной шарнирный параллелограмм O1O2BCDO3O1 с параллельными осями всех цилиндрических шарниров O1, O2, В, С, D и O3. При этом один из кривошипных или коромысловых рычагов, например, рычаг 6 выполнен с возможностью привода от вращательного двигателя, установленного, например, внутри пустотелой призмы 2.
[17]Основание многогранной призмы 2 шарнирно соединено со стойкой 1 посредством трех параллельных рычагов 8, 9 и 10, один из которых, например, рычаг 8 выполнен с приводной вращательной кинематической парой Е, расположенной на трехшарнирной стойке параллельно ее плоскости ENM.
[18]При установке структурных модулей с рабочим органом по два вдоль вертикали каждой из трех боковых граней (фиг. 1) треугольной призмы 2 образуется пространственный шарнирный манипулятор с семью управляемыми степенями свободы (W=7).
[19]В другом варианте - при установке на каждой из боковых граней призмы 2 по одному структурному модулю с рабочим органом (фиг. 2) и их расположении вокруг вертикальной оси призмы 2 - образуется пространственный шарнирный манипулятор с четырьмя управляемыми степенями свободы (W=4).
[20]На фиг. 3 представлен вариант выполнения пространственного параллелограммного механизма манипулятора-трипода, в котором основание пустотелой призмы 2 шарнирно соединено со стойкой 1 посредством трех параллельных рычагов 11, 12 и 13, один из которых, например, рычаг 11 выполнен с приводной вращательной парой Е, расположенной на стойке перпендикулярно ее плоскости ENM.
[21]На фиг. 4 представлен вариант выполнения пространственного параллелограммного механизма манипулятора-трипода, в котором подвижное опорное основание выполнено в виде шарнирно соединенной со стойкой пустотелой четырехугольной призмой 14, например, в виде параллелепипеда, торцевым основанием которого является параллелограмм, а все четыре боковые грани которого представляют прямоугольники с установленными на них структурными модулями с отдельными рабочими органами 15, 16, 17и18.
[22]При установке на каждой из четырех боковых граней по одному структурному модулю с рабочим органом (фиг. 4) и их расположении вокруг вертикальной оси призмы - образуется пространственный шарнирный манипулятор с пятью управляемыми степенями свободы (W=5). В другом варианте при установке структурных модулей попарно между собой по вертикали (аналогично фиг. 1) вдоль каждой из четырех боковых граней параллелепипеда - образуется пространственный шарнирный манипулятор с девятью управляемыми степенями свободы (W=9).
[23]На фиг. 5 представлен вариант выполнения пространственного параллелограммного механизма манипулятора-трипода, в котором подвижное опорное основание выполнено в виде шарнирно соединенной со стойкой пустотелой пятиугольной призмы 19, торцевым основанием которой является пятиугольник, а все пять боковых граней которого представляют прямоугольники с установленными на них структурными модулями с отдельными рабочими органами 20, 21, 22, 23 и 24.
[24]При установке на каждой из пяти боковых граней по одному структурному модулю с рабочим органом (фиг. 5) и их расположении вокруг вертикальной оси призмы - образуется пространственный шарнирный манипулятор с шестью управляемыми степенями свободы (W=6).
[25]На фиг. 6 представлен вариант выполнения пространственного параллелограммного механизма манипулятора-трипода, в котором подвижное опорное основание выполнено в виде шарнирно соединенное со стойкой пустотелой шестиугольной призмы 25, торцевым основанием которой является шестиугольник, а все шесть боковых граней которого представляют прямоугольники с установленными на них структурными модулями с отдельными рабочими органами 26, 27, 28, 29, 30 и 31.
[26]При установке на каждой из шести боковых граней по одному структурному модулю с рабочим органом (фиг. 6) и их расположении вокруг вертикальной оси призмы - образуется пространственный шарнирный манипулятор с семью управляемыми степенями свободы (W=7).
[27]Кривошипные рычаги смежных структурных модулей могут быть кинематически связаны между собой через зубчатые колеса 32 и 33 для образования пространственного манипулятора с согласованным движением разных рабочих органов.
[28]Работа представленного пространственного манипулятора-трипода заключается в следующем.
[29]Привод от вращательных двигателей, установленных внутри пустотелой многогранной призмы и на трехшарнирной стойке передается через двойные шарнирные параллелограммы с параллельными осями всех цилиндрических шарниров на все установленные на боковых гранях пустотелой призмы структурные модули с разными рабочими органами и на пустотелую призму, что обеспечивает их пространственное групповое движение во всем рабочем пространстве без возникновения в нем мертвых и неуправляемых особых положений при повороте всех ведущих кривошипов на полный угол их поворота, равный 360° градусов.
[30]Достигаемый технический эффект заключается в следующем:
[31]1. Упрощение конструкции, изготовления и сборки на основе унифицированных структурных модулей с параллельными осями всех шарниров.
[32]2. Увеличение числа приводимых рабочих органов и уменьшение габаритов.
[33]3. Увеличение числа управляемых степеней свободы и рабочего пространства манипулятора за счет исключения в шарнирном приводе мертвых и неуправляемых особых положений.
[34]4. Постоянство ориентации всех рабочих органов при их перемещении относительно стойки и боковых граней призмы подвижного опорного основания.
[35]5. Возможности применения для групповых технологий с одновременным приводом разных рабочих органов.



{kind=link}