[1]Изобретение относится к методам неразрушающего контроля материалов путем исследования магнитных полей рассеяния и может быть использовано при текущем содержании и техническом обслуживании железнодорожных (ж.д.) путей, в частности, путем оценки величин зазоров в болтовых стыках рельсов.
[2]Безопасность движения поездов как по звеньевому, так и по «бесстыковому» рельсовому пути в значительной мере зависит от состояния болтовых стыков. Бесстыковой путь обычно состоит из сварных рельсовых плетей длиной 800 м и более, которые разделяются уравнительными пролетами (две, три или четыре пары разрядных рельсов длиной 12,5 м на обеих нитках пути, скрепленных болтовыми стыками), зонами стрелочных переводов и станционных путей [1, 2]. Концы бесстыковых рельсовых плетей, становятся «дышащими», т.е. могут изменить свою первоначальную длину при изменениях температуры окружающего воздуха. Кроме того, на бесстыковых путях могут находиться и места временного восстановления (при обнаружении дефекта участок рельсовой плети длиной 8-11 м вырезается и устанавливается временный рельс, соединяемый с рельсами плети с помощью болтовых стыков).
[3]Несмотря на тенденцию перехода к бесстыковому пути (более 75% главных путей на сети дорог ОАО «РЖД» к 2022 г.), на рельсовых путях ж.д. сети содержатся более 9,5 млн. болтовых стыков.
[4]Известно, что в холодное время года рельсы укорачиваются, а в жаркое время - удлиняются. В болтовых стыках рельсов при их укладке оставляют зазоры с тем, чтобы при изменении температуры рельсы могли изменить свою длину во избежание возникновения значительных температурных напряжений (летом - сжатия, зимой - растяжения).
[5]При низких температурах для предупреждения изгиба или среза стыковых болтов зазоры в стыках не должны превышать 22 мм (при использовании рельсов длиной 25 м с диаметрами отверстий 36 мм) [1, 2].
[6]При повышенных температурах (в летнее время) для боковой устойчивости звеньевого пути не допускается иметь более двух подряд нулевых зазоров для рельсов длиной 25 м и более четырех - при рельсах длиной 12,5 м. Неконтролируемые температурные расширения рельсовой плети (летом) могут привести к так называемому «выбросу» пути и к сходу подвижного состава с рельсов. По действующим нормам [1, 2] изменение зазоров более чем на 52 мм при трех уравнительных рельсах требует замены одного из них [3].
[7]Периодическая оценка величин стыковых зазоров позволяет прогнозировать надежность рельсового пути и предотвратить нежелательные последствия при наступлении экстремальных и близких к ним температур [2, 4]. Таким образом, в зависимости от времени года существует два принципиально разных подхода к мониторингу состояния стыковых зазоров: при низких температурах нельзя допускать увеличение стыковых зазоров выше допустимого, а при высоких положительных температурах - уменьшение величин стыковых зазоров до нулевого значения. Значит, и подходы к оценкам искомой величины также могут быть разными.
[8]Известен акустический способ обнаружения неисправностей рельсового пути [5], где по параметрам акустических импульсов, возникающих в результате механического удара колеса подвижной единицы о кромки болтового стыка рельсового пути, оценивают величину стыкового зазора. Известный способ сложен в реализации и обеспечивает низкую точность и достоверность оценки.
[9]Известны способы и устройства видеорегистрации рельсового пути с помощью оборудования, установленного на диагностических вагонах путеизмерения [6] и дефектоскопии [7], с помощью которых, естественно, можно оценить и величины стыковых зазоров. Известен также способ обнаружения напряжений в рельсах [8], где одной из основных операций является определение стыкового зазора с помощью системы видеорегистрации болтовых стыков. Однако, зависимость получаемых результатов от климатических условий (снег, дождь, тени на рельсах от объектов инфраструктуры), грубые ошибки из-за наплывов (козырьков) металла на концах рельсов, а также сложность обработки видеосигналов обуславливают низкую достоверность и надежность известных технических решений.
[10]Известны устройства [9, 10 и 11] и способы оценки стыковых зазоров с помощью вихретоковых преобразователей [12]. Известные способ и устройства требуют создания специальной аппаратуры, значительно зависят от положения датчиков относительно поверхности катания рельса и обладают низкой достоверностью и надежностью.
[11]Известны способы обнаружения разрыва рельсов ж.д. пути (например, [13]), реализуемые с использованием электрических или оптоволоконных кабелей, укладываемых вдоль рельсов для обнаружения разрыва ж.д. пути. Однако эти способы требуют значительных первоначальных вложений и не обеспечивают возможность определения величин зазоров с требуемой точностью.
[12]Известен способ обнаружения дефектов в рельсах магнитодинамическим методом неразрушающего контроля [14, 15] (в зарубежной литературе используется термин «MFL method» - метод вытеснения магнитного потока), заключающийся в возбуждении соответствующими средствами постоянного магнитного потока в рельсе и фиксации магнитного поля с помощью датчиков аномалий (индукционных катушек или датчиков Холла), установленных на участке рельса с постоянным магнитным потоком. При совместном перемещении указанных средств возбуждения и датчиков появляется возможность обнаружения аномалий магнитного поля в головке рельса, в частности, вызванных дефектами в головке рельсов и разрывами (болтовыми стыками) ж.д. пути.
[13]Известен способ обнаружения разрыва рельсов ж.д. пути [16], при котором генерируют магнитное поле в рельсах, фиксируют рассеянное магнитное поле двумя датчиками, сдвинутыми относительно друг друга вдоль рельсов на определенное расстояние, и вычисляют дифференциальный сигнал с указанных датчиков. Недостатком известного способа, принятого за прототип, является ограниченная область применения, заключающаяся в отсутствии возможности определения и оценки величин стыковых зазоров уравнительных звеньев рельсового пути с требуемой достоверностью.
[14]Задачей, решаемой предлагаемым способом, является повышение достоверности и надежности оценки величин стыковых зазоров ж.д. пути в широком диапазоне температур в автоматическом режиме.
[15]Поставленная задача решается тем, что в способе оценки стыковых зазоров генерируют магнитное поле в рельсах, фиксируют рассеянное магнитное поле магниточувствительными датчиками, причем рельс намагничивают до уровня, близкого к магнитному насыщению с помощью системы намагничивания, обеспечивающей стабильный магнитный поток в рельсе, определяют зону болтового стыка, измеряют параметры сигнала, вызванного рассеянием магнитного поля в зоне зазора и по измеренным параметрам оценивают величину стыкового зазора. В частном случае, при отрицательных температурах окружающего воздуха, в качестве параметра сигнала преимущественно используют временной интервал между экстремумами сигнала от стыкового зазора. В другом частном случае, при положительных температурах окружающего воздуха, в качестве параметра сигнала преимущественно используют амплитуду сигнала от стыкового зазора.
[16]Отличительными особенностями предлагаемого способа по сравнению с прототипом и уровнем техники являются:
[17]1. Рельс намагничивают до уровня, близкого к магнитному насыщению с помощью специальной системы намагничивания, обеспечивающей стабильный магнитный поток в рельсе, например, известной по патентам [14, 15] с размещением электромагнитов на осях колесных пар двухосной тележки и использованием колес в качестве полюсов магнита. В отличие от прототипа, это позволяет уменьшить ложные показания при анализе аномальных участков с наплывом металла рельса с образованием «козырьков» в зоне стыкового зазора. В прототипе накладной магнит с определенным технологическим зазором полюса относительно поверхности катания не позволяет обеспечивать намагничивание исследуемой головки рельса на достаточную глубину, что снижает достоверность определения сигналов от стыковых зазоров (разрывов рельсового пути).
[18]2. Использование системы намагничивания, обеспечивающей стабильный магнитный поток в контролируемых рельсах, повышает достоверность и надежность оценки величин стыковых зазоров. В прототипе используют накладной магнит, полюс которого находится на определенном расстоянии (40 мм в [16]) от поверхности катания рельса. В процессе движения системы из-за динамических воздействий величина этого технологического зазора будет флуктуировать, что приводит к искажению магнитного поля, возбуждаемого в поверхностном слое головки рельса, и к снижению достоверности и точности определения искомой величины. Кроме того, эксплуатация системы, где на незначительном расстоянии от поверхности катания рельса висит массивный объект (в прототипе - постоянный магнит), небезопасна и может привести к повреждению и полной неработоспособности способа на эксплуатируемых ж.д. путях.
[19]3. Предварительное обнаружение зоны болтового стыка позволяет более точно определять стыковой зазор, повышает достоверность определения величин стыковых зазоров и снижает нагрузку на блок обработки, одновременно повышая производительность способа, т.к. на бесстыковых путях стыковые зазоры встречаются сравнительно редко (в основном, в зоне уравнительных пролетов). В прототипе процедура определения болтового стыка не предусмотрена, что приводит к необходимости мощной и непрерывной обработки всего поступающего на магниточувствительные датчики потока сигналов. При этом возможна как перебраковка, так и пропуск сигналов от болтовых стыков.
[20]4. Измеряют параметры сигнала, вызванного рассеянием магнитного поля и по измеренным параметрам оценивают величину стыкового зазора. В общем случае для реализации способа достаточно использовать один датчик на каждый рельс, или же одну линейку датчиков Холла, установленную поперек головки рельса, что упрощает конструкцию устройства, реализующего предлагаемыйспособ, и повышает точность оценки. В прототипе для получения дифференциального сигнала требуется использование двух магниточувствительных датчиков. Это усложняет реализацию известного способа и снижает точность измерения, так как датчики разнесены по длине рельса и могут по-разному реагировать на динамические воздействия на них в зоне разрыва рельса.
[21]5. В качестве измеряемого параметра используют расстояние между экстремумами сигнала от стыкового зазора, дающее достоверные данные при оценке значительных (до 50 мм) величин зазоров, что характерно для отрицательных температур воздуха (и рельсов), и может привести к срезу стыковых болтов и к нарушению целостности рельсового пути. В прототипе вопросы оценки величин зазоров болтовых стыков при низких температурах не рассматриваются.
[22]6. Для малых величин стыковых зазоров (от 0 до ≈7 мм) в качестве измеряемого параметра используют амплитуду сигнала от стыкового зазора, чувствительную для малых значений. Этот параметр актуален в летних условиях, когда уменьшение величины стыкового зазора до нулевого значения ограничивает температурное расширение рельсов и может привести к нарушению геометрии (к выбросу) рельсового пути. В прототипе вопросы оценки величин стыковых зазоров вблизи нулевого значения не рассматриваются.
[23]Таким образом, совокупность отличительных признаков заявляемого способа позволяет получить нужный технический результат: повышение достоверности и надежности оценки величин стыковых зазоров и, как следствие, повышение безопасности эксплуатации рельсового пути.
[24]Реализация способа демонстрируется следующими иллюстративными материалами:
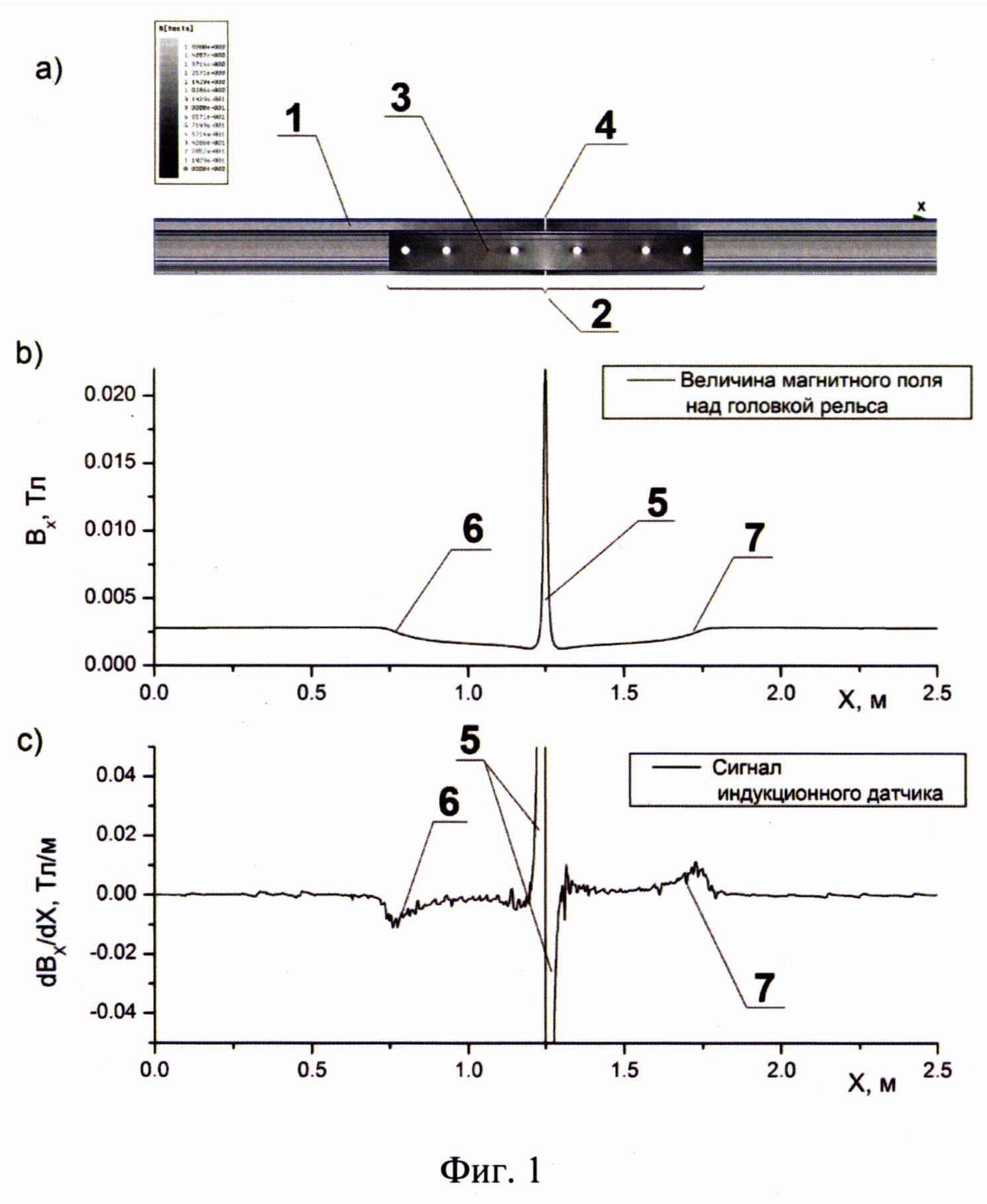
[25]Фиг. 1. Характер изменения магнитного поля (фиг. 1b) и форма сигнала индукционного датчика (фиг. 1с), при прохождении намагничивающей системы с датчиком над зоной болтового стыка (фиг. 1a), где:
[26]1 - контролируемый ж.д. рельс;
[27]2 - зона болтового стыка с накладками 3 и стыковым зазором 4;
[28]5 - сигнал от стыкового зазора 4 и реакции 6 и 7 от начала и от конца стыковых накладок 3 при фиксации их датчиками Холла (фиг. 1b) и индукционным датчиком (фиг. 1с)
[29]Фиг. 2. Вид сигнала от стыкового зазора 4, где:
[30]а - амплитуда (размах) сигнала;
[31]w - ширина положительного выброса;
[32]d - расстояние между экстремумами сигнала.
[33]Фиг. 3. Результаты моделирования и экспериментальные зависимости параметров сигнала от величины стыкового зазора 4 во всем диапазоне измерений: фиг. 3а - результаты моделирования; фиг. 3b - экспериментальные зависимости.
[34]Фиг. 4. Результаты моделирования и экспериментальные зависимости параметров сигнала от величины стыкового зазора 4 при малых величинах: фиг. 4а - результаты моделирования; фиг. 4b - экспериментальные зависимости.
[35]Способ реализуется следующим образом. Мобильное дефектоскопическое средство с заданной скоростью перемещается по рельсовому пути. Электромагнитные катушки (соленоиды), установленные на осях колесных пар двухосной тележки (на фиг. не показаны) известным способом [14, 15], возбуждают постоянный магнитный поток на участках рельсов, расположенных между полюсами электромагнита (пятнами контакта колесных пар с рельсами). Магниточувствительные датчики (на фиг. не показаны), установленные на поверхности катания в межполюсном пространстве, воспринимают аномалии магнитного поля: дефекты и конструктивные элементы рельсового пути (стрелочные переводы, болтовые стыки и зазоры между соединяемыми рельсами, сварные швы и т.п.). Как правило, амплитуды сигналов от стыковых зазоров имеют большие значения по сравнению с сигналами от сварных стыков и потенциальных дефектов рельсов. По этому признаку и с использованием технических решений по патентам [14, 17, 18] удается с высокой достоверностью распознать сигналы от стыковых зазоров на фоне остальных сигналов.
[36]В качестве магниточувствительных датчиков при реализации способа могут использоваться индукционные катушки; датчики Холла (единичные, в виде линеек или матрицы); тонкопленочные магниторезистивные датчики [19]. Индукционные датчики, как наиболее надежные для работы в широком диапазоне температур и простые в эксплуатации, предпочтительнее для реализации способа. При применении датчиков Холла поступающие сигналы предварительно необходимо подвергнуть операции дифференцирования.
[37]В традиционных мобильных средствах дефектоскопии, реализующих MFL-метод [20], датчики устанавливаются на износостойкий немагнитный протектор (композитные материалы или нержавеющая сталь), скользящий по поверхности катания контролируемых рельсов. При этом обеспечивается постоянный зазор (на практике 2-4 мм) между измерительными датчиками и поверхностью рельса, что дополнительно повышает стабильность измеряемых параметров и не требует специальных технических решений, известных из уровня техники, по отслеживанию зазора между датчиком и поверхностью рельса. Так как степень прижатия датчиков к рельсу невелика, то эксплуатационные свойства протекторов обеспечивают контроль 1000 км рельсового пути и более без их замены.
[38]В процессе сканирования рельсов в общем потоке сигналов, последовательно поступающих на магниточувствительные датчики, сигналы от болтовых стыков могут быть выделены по их характерным признакам: наличию сигналов (откликов 6 и 7 на фиг. 1b и 1с) от концов стыковых накладок 3 и сигнала 5 значительной амплитуды определенной формы (фиг. 1 и 2) от стыкового зазора 4 в середине между концами накладок [20 и 21]. Достоверность распознавания сигналов от болтовых стыков можно дополнительно повысить с использованием специальной обработки [22].
[39]Зависимость отдельных параметров сигнала 5 от величины стыкового зазора предварительно оценена путем математического моделирования (фиг. 3а). Наблюдается почти линейная зависимость расстояний d между максимумами (экстремумами) двухполярного импульса 5 от величины стыкового зазора 4 (фиг. 1 и 2) в диапазоне зазоров от ≈7 до 30 мм. Результаты моделирования подтверждаются и экспериментальными исследованиями. Анализ величин более 180 стыковых зазоров (на скоростном участке ж.д. пути Москва - Санкт-Петербург) и сравнение их со значениями d на дефектограммах магнитного канала вагона-дефектоскопа, периодически курсирующего по этому перегону, убедительно показывает принципиальную возможность оценки искомого параметра по значению d (фиг. 3b). Вагон-дефектоскоп оснащен системой намагничивания, где электромагниты размещены на осях колесных пар, а полюсами электромагнита служат колеса двухосной тележки вагона фиг. 3а [14, 15, 21]. В общем случае система намагничивания, создающая стабильный магнитный поток в рельсе в процессе движения, может иметь и иную конструкцию (например, аналогичную [23]).
[40]На зависимостях (фиг. 3) в области малых (от 0 до ≈7 мм) величин зазоров наблюдается зона неопределенности. По значению d (на фиг. 3а, в зоне, где d ≈10 мм) можно лишь сделать вывод, что стыковой зазор находится в области малых (≈ до 7 мм) значений. В условиях повышенных положительных температур эти знания для эффективного содержания рельсового пути по требованиям нормативных документов [1, 2] могут быть недостаточны.
[41]Поиск дополнительных способов оценки малых величин стыковых зазоров по сигналам магнитного контроля показывают, что в этом случае, более информативной оказывается величина размаха (а - амплитуда) сигнала от зазора (фиг. 2). Как результаты математического моделирования (фиг. 4а), так и практические данные (фиг. 4b), полученные в указанных выше условиях, подтверждают этот вывод. Измеряя амплитуду сигнала от стыкового зазора, можно с достаточной для практики точностью оценить величину зазора в диапазоне от 0 до 7 мм.
[42]Вопросы определения амплитуд а сигналов от стыкового зазора и расстояния d между экстремумами (при известной скорости движения диагностического средства) не представляют трудностей и выполняются известными радиотехническими способами.
[43]Таким образом, в процессе движения мобильного диагностического средства, оснащенного системой намагничивания и магниточувствительными датчиками, из потока регистрируемых сигналов выделяются сигналы от зон болтовых стыков, определяются параметры сигналов от стыковых зазоров (расстояние между экстремумами и амплитуда сигнала) и по измеренным параметрам оценивают величины стыковых зазоров болтовых соединений рельсового пути. В условиях значительных отрицательных температур (ниже минус 20°С), из процедуры анализа можно исключить этап измерения амплитуд сигналов, дополнительно упрощая реализацию способа.
[44]Высокая достоверность и надежность оценки стыковых зазоров заявленным способом обеспечивается использованием магнитного (MFL) контроля, основанного на генерации стабильного магнитного потока в контролируемом рельсе и фиксации рассеяний магнитного потока с помощью магниточувствительных датчиков с постоянным технологическим зазором между датчиком и поверхностью сканирования [14, 20-22].
[45]Информация, полученная о величине стыковых зазоров, при дальнейшей цифровой обработке позволяет осуществить в автоматизированном виде:
[46]- определение наличия двух и более стыков с нулевыми зазорами;
[47]- оценку увеличения зазоров более чем на 52 мм при трехзвеньевых уравнительных пролетах;
[48]- проводить мониторинг состояния стыковых зазоров и рельсового пути в процессе скоростного сканирования.
[49]В настоящее время все эти операции, требуемые в нормативно-технической документации по текущему содержанию рельсового пути, в основном выполняются вручную.
[50]Важно отметить, что предлагаемый способ реализуется без прерывания основной функции скоростного дефектоскопического средства: выявление поверхностных и внутренних дефектов в головке рельса методом вытеснения магнитного потока (MFL). Предложенные в заявке подходы реализуются путем введения дополнительной обработки текущих сигналов контроля, получаемых в процессе рабочего проезда мобильного средства по рельсовым путям. В дополнение к выявлению дефектов, реализация способа позволяет оценивать с достаточной для практики точностью величины зазоров в болтовых стыках рельсов ж.д. пути.
[52]1. Инструкция по текущему содержанию железнодорожного пути. Распоряжение ОАО «РЖД» №2288/р от 14.11.2016.
[53]2. Инструкция по укладке, содержанию и ремонту бесстыкового пути. Распоряжение ОАО «РЖД» №2544/р от 14.12.2016 (с изменениями от 09.09.2022).
[54]3. Стоянкович Г.М., Пупатенко В.В. Температурные деформации в зоне уравнительных пролетов бесстыкового пути // Путь и путевое хозяйство. 2019, №6, с. 34-37.
[55]4. Мелихов С.Н, Бондаренко А.А., Матвецов В.И. Попикетный контроль стыковых зазоров и температурная надежность звеньевого пути // Путь и путевое хозяйство. 2022, №8, с. 29-32.
[71]20. А. Марков, А. Антипов. Магнитная дефектоскопия рельсов. Новые возможности // LAP LAMBERT Academic Publishing RU. 2018. ISBN: 978-613-9-88764-4. 103 c.
[72]21. Марков A.A., Кузнецова E.A. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 2. Расшифровка дефектограмм // СПб.: Ультра Принт, 2014. 332 с.


{kind=link}
{kind=link}