[1]Заявленное изобретение относится к фотограмметрии, может быть использовано при дистанционном зондировании Земли, картографировании местности, определении координат точек местности.
[2]Известен способ RU 2152625 С2 (Научно-производственное объединение прикладной механики), 10.07.2000. Способ позволяет определять ориентацию объектов по навигационным радиосигналам космических аппаратов спутниковых радионавигационных систем, при котором каждые из четырех (пяти) антенно-приемных устройств двухбазового интерферометра со взаимно ортогональными базами, установленные на объектах, принимают навигационные радиосигналы.
[3]Указанный способ включает сложную математическую обработку данных от космических аппаратов спутниковых радионавигационных систем принятых четырьмя (пятью) антенно-приемными устройствами, что усложняет реализацию способа и одновременно снижает оперативность определения элементов внешнего ориентирования.
[4]Также известен способ RU 2597024 С1 (Андронов В.Г., Емельянов С.Г.), 10.09.2016, состоящий в измерении на интервале съемки значений углов тангажа, крена и рыскания и составляющих угловой скорости космического аппарата гироинерциальными датчиками и получения значений координат и составляющих скорости движения космического аппарата в моменты бортовых измерений.
[5]Наличие сложного математического аппарата и необходимости получения совместных гироскопических и координатных определений снижает оперативность определения элементов внешнего ориентирования, одновременно усложняет реализацию способа.
[6]Кроме того известен способ определения угловых элементов внешнего ориентирования снимка [Способ определения угловых элементов внешнего ориентирования снимка: пат. 2704540 Рос. Федерация: МПК G01C 11/02, G01C 1/00 / Чернов И.В.; заявитель и патентообладатель Чернов И.В. - №2019102111; заявл. 25.01.19; опубл. 29.10.19, Бюл. №31], включающий: фотографирование объекта, местности; прием данных от спутниковых радионавигационных систем (РНС) и преобразование их в данные местоположения фазовых центров антенн, которые расположены соосно с линией направления съемки; расчет продольного и поперечного угла наклона снимка по прямоугольным геодезическим координатам фазовых центров антенн приема сигналов навигационных систем.
[7]Элементы внешнего ориентирования (ЭВО) снимков позволяют выполнить определения координат местности для ее картографирования. Для повышения точности реализации способа-прототипа необходимо увеличивать расстояние межу антеннами приемников РНС. Чем больше будет расстояние между антеннами на мачте, тем точнее будут определены элементы внешнего ориентирования снимка и как следствие точнее будет выполнено определение координат местности.
[8]Наиболее близким по существу заявляемого изобретения является способ фотограмметрического определения координат точек местности на недоступной территории [Способ фотограмметрического определения координат точек местности на недоступной территории / Нечипас Ю.П., Левадный Ю.В., Телеш В.А. // Навигация и гидрография. - 2018. -№53. - С. 34-39] (далее способ-прототип), включающий: полевую планово-высотную подготовку (ПВП) доступной территории; одновременное фотографирование доступной и недоступной территории и определение координат точки фотографирования по сигналам РНС; определение ЭВО; определение координат определяемых точек недоступной территории.
[9]Способ-прототип имеет существенный недостаток, состоящий в необходимости выполнения полевой ПВП и видимости из точки фотографирования доступной территории (территории на которой выполнена полевая ПВП).
[10]Заявленное изобретение предназначено для определения ЭВО снимка местности (объекта) по изображениям летательных аппаратов-марок (ЛАМ) на снимке и их геодезическим координатам.
[11]Технический результат применения способа выражается в определении ЭВО снимка местности (объекта) без использования наземной ПВП.
[12]Технический результат применения способа достигается тем, что во время фотографирования, между фотографируемой местностью (объектом) и летательным аппаратом дистанционного зондирования Земли (ЛАДЗЗ) помещаются ЛАМ и используя сигналы РНС, определяют координаты местоположения ЛАМ и ЛАДЗЗ в момент фотографирования, а также в данные о моменте времени фотографирования. Данные положения ЛАМ в момент фотографирования используются также как точки ПВП, по которым определяются ЭВО снимка.
[13]В итоге способ позволяет определять координаты точек местности, создавать планы и карты без использования полевой ПВП (определение ЭВО по точкам полевой ПВП включает определение путем инструментальных измерений на местности координат этих точек (путем проведения полевых работ на местности, это трудоемкие и не всегда реализуемые работы).
[15]ЛАДЗЗ и ЛАМ оборудуются приемниками сигналов РНС; хронографами (часами) с возможностью коррекции по сигналам РНС и устройствами дистанционного зондирования Земли; устройствами обработки, хранения и передачи: данных сигналов РНС, моментов фотографирования и изображений местности.
[16]Для реализации способа предлагается следующая последовательность действий:
[17]- размещение ЛАМ, между фотографируемой местностью и ЛАДЗЗ;
[18]- получение изображения (фотографирование) местности и ЛАМ на фоне этой местности с одновременной фиксацией момента времени фотографирования, приемом и записью данных от РНС на ЛАДЗ и каждом ЛАМ;
[19]- передача на устройство обработки: изображения местности, данных о моменте фотографирования, данных от РНС;
[20]- преобразование данных от РНС в данные местоположения ЛАМ и ЛАДЗ (координаты ЛАМ p1{Χ1, Υ1, Ζ1}, …, pn{Xn, Υn, Ζn} и координаты ЛАДЗ S{XS, YS, ZS}, где n - число ЛАМ отображенных на снимке) в момент фотографирования (n≥4);
[21]- вычисление элементов внешнего ориентирования снимка.
[22]Вычисление элементов внешнего ориентирования снимка выполняются по формулам обратной фотограмметрической засечки (ОФЗ)
[23]
[24]где x и y - измеренные координаты изображения ЛАМ на снимке (плоские координаты);
[25]ƒ - фокусное расстояние снимка;
[26]Χ,Υ,Ζ- координаты ЛАМ в момент фотографирования в геодезической системе координат;
[27]XS, YS, ZS - координаты точки фотографирования в геодезической системе координат;
[28]ai, bi, ci - элементы матрицы направляющих косинусов, зависящие от угловых элементов внешнего ориентирования снимка α - продольный угол наклона снимка, ω - поперечный угол наклона снимка, к - угол поворота снимка [А.Н. Лобанов, Фототопография. Аэрофототопографическая съемка. М.: изд. ВИА. - 1971. - 535 с.].
[29]Для приведения уравнений вида (1) к линейному виду пользуются известным приемом разложения их в ряд Тейлора с сохранением только членов первого порядка малости. Для разложения зависимостей (1) в ряд Тейлора необходимы приближенные значения ЭВО фотоснимка. Обозначим их через (XS)0, (YS)0, (ZS)0, (α)0, (ω)0, (κ)0. В процессе решения ОФЗ ищут поправки к приближенным значениям ЭВО фотоснимка, которые обозначают как δXS, δYS, δΖS, δα, δω, δκ.
[30]В результате разложения зависимостей (1) в ряд Тейлора, получают линейные уравнения:
[31]
[32]где (х) и (у) - вычисленные координаты изображения ЛАМ на снимке с использованием приближенных значений ЭВО. Вычисленные координаты (х) и (у) будут отличаться от измеренных χ и у.
[34]
[35]С учетом принятых обозначений, составляют уравнения поправок:
[36]
[37]где значения коэффициентов уравнений поправок, являются частными производными зависимостей (1) по соответствующим аргументам (ЭВО фотоснимка):
[38]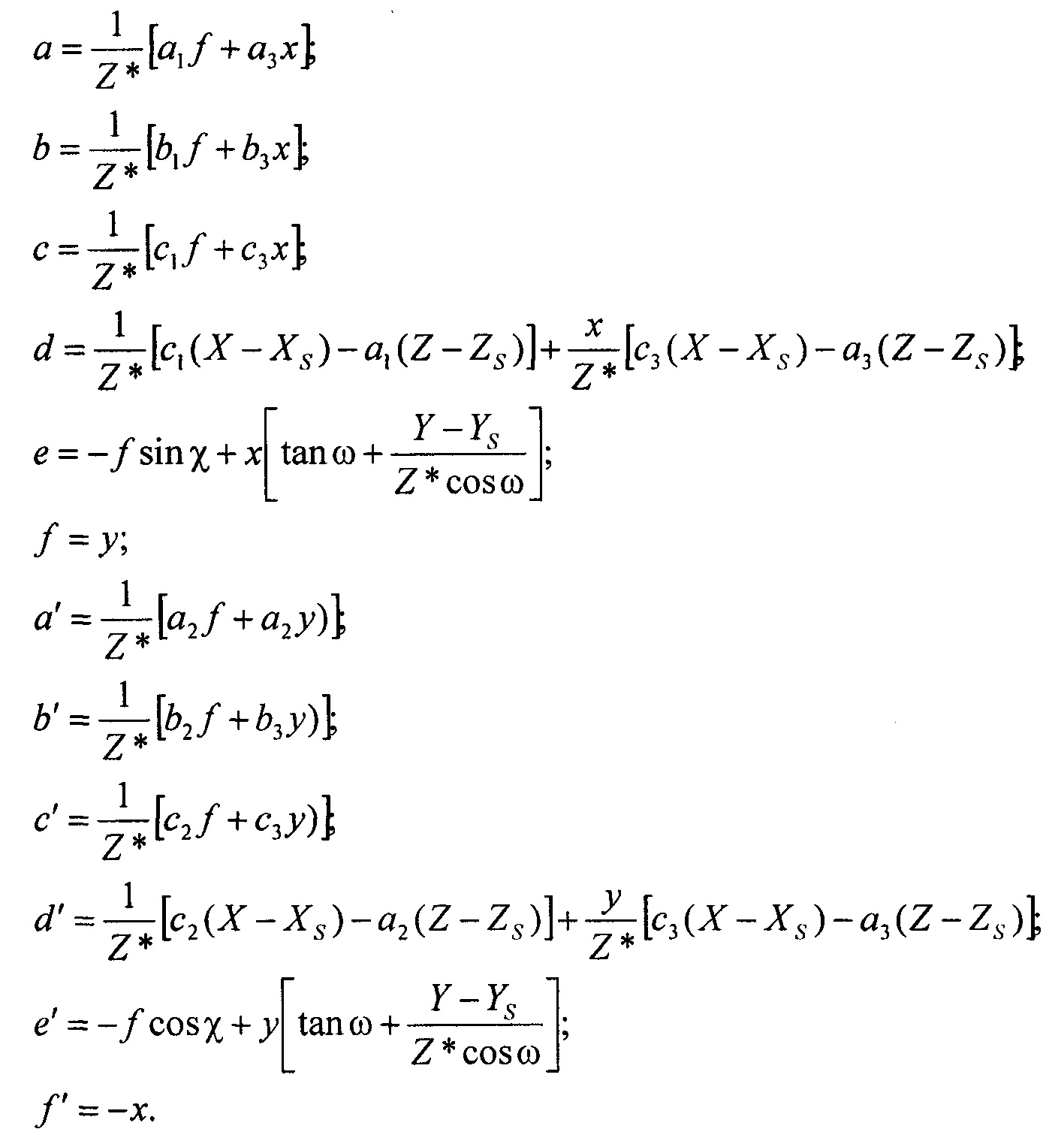
[39]Одна опорная точка позволяет составить два уравнения с весами рх и ру и шестью неизвестными. Для решения задачи необходимо 4 опорные точки (необходимо обеспечить избыточность измерений).
[40]Систему уравнений (3) решают под основным условием метода наименьших квадратов:
[41]
[42]Таким образом, будут получены элементы внешнего ориентирования снимка, позволяющие вычислять геодезические координаты всех точек местности (объекта) отображенных на снимке.

