[1]Изобретение относится к контрольно-измерительной технике и может быть использовано при учете и контроле потребления воды и других текучих сред.
[2]Известен способ определения расхода тепла в тепловой сети, содержащей центробежные электронасосы (патент RU 2022235, МПК G01F 9/00, опубл. 30.10.1994). Сущность изобретения: для повышения точности и упрощения измерения расхода тепла измеряют одновременно активную мощность, потребляемую электродвигателем привода насоса, давление на нагнетании и всасе насоса, температуру теплоносителя на подающем и обратном трубопроводах тепловой сети, вычисляют мощность, действующую на валу насоса, и давление на нагнетании, развиваемое собственно насосом, определяют расчетный коэффициент подачи путем давления на мощность и вычитания результата из постоянного числа, равного отношению давления к мощности при нулевой подаче, строят характеристику, отражающую зависимость расчетного коэффициента от подачи, и по ней определяют производительность насоса и умножают на разность температур в подающем и обратном трубопроводах тепловой сети.
[3]Наиболее близким к заявляемому является способ определения количества текучей среды (патент RU 2108549, МПК G01F 15/07, опубл. 10.04.1998), где измеряют количество электроэнергии А, потребленное электродвигателем привода насоса, имеющего линейную характеристику зависимости потребляемой мощности от подачи N=f(Q), за время Т. Количество V перекачанной воды определяют из математического выражения V=K1Aн - К2Т, где Ан=η⋅A, K1=(Q2-Q1)/N2-N1; K2=(Q2-Q1)/(N2-N1)-Q1; Q1, Nb Q2, N2 - координаты двух точек, взятых на границах зоны работы насоса, на его линейной характеристике, η - КПД электродвигателя.
[4]Недостатками известных способов является невысокая точность определения расхода при изменении скорости вращения ротора асинхронного двигателя, а также необходимость определения КПД электродвигателя и использование линейной характеристики зависимости потребляемой мощности от подачи, что в свою очередь ограничивает применение известных способов.
[5]Техническим результатом изобретения является повышение точности определения расхода жидкости центробежных насосов с асинхронными двигателями.
[6]Данный технический результат достигается тем, что измеряют мгновенные величины токов и напряжений статора асинхронного двигателя, преобразуют трехфазные значения токов и напряжений в двухфазные составляющие токов и напряжений, определяют оцененные составляющие тока статора, вычисляют разницу между оцененными значениями составляющих тока статора и текущими значениями составляющих стока статора, определяют оцененные значения составляющих потокосцеплений ротора, по оцененным значениям составляющих тока статора и потокосцепления ротора определяют электромагнитный момент асинхронного двигателя, с помощью оцененных значений составляющих потокосцепления ротора и разниц между оцененными значениями составляющих тока статора и текущими значениями составляющих стока статора определяют момент нагрузки центробежного насоса, с помощью значений электромагнитного момента асинхронного двигателя и момента нагрузки центробежного насоса определяют текущую угловую скорость вращения рабочего колеса центробежного насоса, определяют гидравлическую мощность насоса, по значениям гидравлической мощности и скорости вращения ротора определяют действительный расход насосной установки.
[7]Сущность технического решения поясняется формулами (1-10).
[8]Двухфазные значения токов и напряжений определяются по формулам преобразования [Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: учебник для студ. высш. учеб. заведений. - 2-е изд., испр. - М.: Издательский центр «Академия», 2007 г. - 272 с.] (1-2):
[9]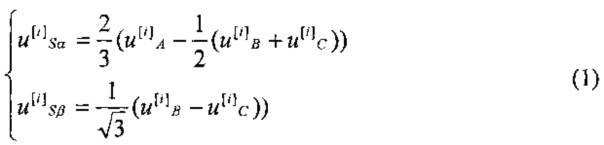
[10]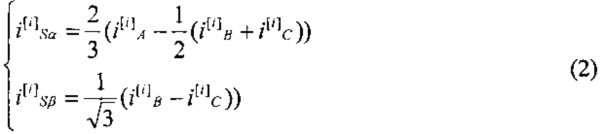
[11]где, u[i]А(B,C) - фазные значения напряжения статора асинхронного двигателя, В;
[12]i[i]А(B,C) - фазные значения токов статора асинхронного двигателя;
[13]u[']Sα(β) - составляющая напряжения статора асинхронного двигателя (измеренное значение), В;
[14]i[i]Sα(β) - составляющая тока статора асинхронного двигателя (измеренное значение), А.
[15]Оцениваемые значения тока статора определяются через математическое описание асинхронного двигателя в неподвижной системе координат для статорной обмотки, при этом уравнение по второму закону Кирхгоффа дополняется усиленной разницей (невязкой) между измеренными (i[i]Sα(β)) и оцененными значениями  токами статора:
токами статора:
[16]
[17]Оцениваемые значения тока статора асинхронного двигателя одной составляющей определяются по формуле (3) в операторном виде (р - оператор дифференцирования) на каждом i-м шаге:
[18]
[19]где u[i]Sα(β) - составляющая напряжения статора асинхронного двигателя (измеренное значение), В;
[20]i[i]Sα(β) - составляющая тока статора асинхронного двигателя (измеренное значение), А;
[21] - составляющая потокосцепления ротора асинхронного двигателя (оцененное значение), Вб;
- составляющая потокосцепления ротора асинхронного двигателя (оцененное значение), Вб;
[22]kLIs - коэффициент усиления невязок тока, Ом;
[23]kR - безразмерный параметр асинхронного двигателя, о.е.;
[24]RS - сопротивление статора асинхронного двигателя, Ом;
[25]TS - постоянная времени статора асинхронного двигателя, с.
[26]Оцениваемые значения невязок (разниц между реальным и оцененным значением) тока статора одной составляющей определяются по формуле (4):
[27]
[28]где, i[i]Sα(β) - составляющая тока статора асинхронного двигателя (измеренное значение), А;
[29] - оцениваемое значение тока статора асинхронного двигателя, А.
- оцениваемое значение тока статора асинхронного двигателя, А.
[30]Оцениваемые значения потокосцепления ротора одной составляющей определяются через математическое описание асинхронного двигателя в неподвижной системе координат по формуле в операторном виде (5):
[31]
[32]где р - оператор дифференцирования, с-1,
[33] - угловая скорость ротора (оцененное значение), рад/с,
- угловая скорость ротора (оцененное значение), рад/с,
[34] - составляющая тока статора асинхронного двигателя (оцененное значение), А;
- составляющая тока статора асинхронного двигателя (оцененное значение), А;
[35] - составляющая потокосцепления ротора асинхронного двигателя (оцененное значение), Вб;
- составляющая потокосцепления ротора асинхронного двигателя (оцененное значение), Вб;
[36]рр - число пар полюсов асинхронного двигателя;
[37]RR - сопротивление ротора асинхронного двигателя, Ом;
[38]TR - постоянная времени ротора асинхронного двигателя, с.
[39]Оцениваемые значения электромагнитного момента определяются через математическое описание асинхронного двигателя в неподвижной системе координат по формуле (6):
[40]
[41]где  ,
,  - составляющие потокосцепления ротора асинхронного двигателя (оцененные значения), Вб;
- составляющие потокосцепления ротора асинхронного двигателя (оцененные значения), Вб;
[42] ,
,  - составляющие тока статора асинхронного двигателя (оцененные значения), А;
- составляющие тока статора асинхронного двигателя (оцененные значения), А;
[43]kR - безразмерный параметр асинхронного двигателя, о.е.;
[44]рр - число пар полюсов.
[45]Оцениваемые значения момента нагрузки насоса определяются по формуле (7) через потокосцепления ротора двигателя и «невязки» проекций токов статора:
[46]
[47]где KTmp - коэффициент усиления момента, о.е.,
[48]kR - безразмерный параметр асинхронного двигателя, о.е.;
[49] , - составляющие потокосцепления ротора асинхронного двигателя (оцененные значения), Вб;
, - составляющие потокосцепления ротора асинхронного двигателя (оцененные значения), Вб;
[50] ,
,  - составляющие невязок тока статора асинхронного двигателя (оцененные значения), А.
- составляющие невязок тока статора асинхронного двигателя (оцененные значения), А.
[51]Оцениваемые значения угловой скорости ротора определяются по формуле (8) в операторном виде:
[52]
[53]где р - оператор дифференцирования, с-1;
[54]J - момент инерции механизма, кг⋅м2;
[55] - электромагнитный момент асинхронного двигателя, Нм;
- электромагнитный момент асинхронного двигателя, Нм;
[56] - момент нагрузки насоса, Нм.
- момент нагрузки насоса, Нм.
[57]Гидравлическая мощность насоса определяется по формуле (9) как произведение скорости вращения вала насоса на момент сопротивления насоса:
[58]
[59]где Т0 - момент трения, Н⋅м;
[60] - угловая скорость ротора асинхронного двигателя (оцененное значение), рад/с;
- угловая скорость ротора асинхронного двигателя (оцененное значение), рад/с;
[61] - момент нагрузки насоса, Нм.
- момент нагрузки насоса, Нм.
[62]Одновременно гидравлическая мощность насоса  определяется как произведение давления нагнетаемого насосом РСР и подачей насоса
определяется как произведение давления нагнетаемого насосом РСР и подачей насоса  .
.
[63]Давление насоса РСР определяется через параметры напорной характеристики насоса, плотность жидкости (ρr) и угловую скорость вала насоса  , и относительный расход насоса (q[i]r):
, и относительный расход насоса (q[i]r):
[64]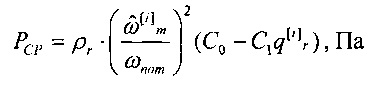
[65]Расход жидкости насоса  определяется по формуле (10)
определяется по формуле (10)
[66]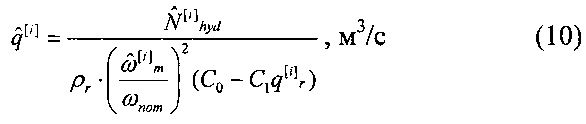
[67]где ρr - плотность жидкости, кг/м3;
[68]ωпот - номинальная угловая скорость насоса, рад/с;
[69]С0, C1 - параметры напорной характеристики насоса;
[70] - гидравлическая мощность насоса, Вт;
- гидравлическая мощность насоса, Вт;
[71] - относительный расход насоса, м3/с;
- относительный расход насоса, м3/с;
[72] - угловая скорость ротора асинхронного двигателя (угловую скорость вала насоса), рад/с.
- угловая скорость ротора асинхронного двигателя (угловую скорость вала насоса), рад/с.
[73]В проведенных экспериментах на насосе К8-18 с асинхронным двигателем АД80М2 погрешность определения расхода уменьшилась на 4-5%.
[74]Таким образом, заявленный способ позволяет повысить точность определения расхода жидкости центробежного насоса с асинхронным электроприводом.

