[1]Полезная модель относится к области биомедицинских и ветеринарных технологий и предназначена для оценки влияния последствий поведения мелких лабораторных животных на само поведение.
[3]Известен аппарат для исследования когнитивных способностей лабораторных животных “Intellicage” (см. Winslow W. et al. IntelliCage automated behavioral phenotyping reveals behavior deficits in the 3xTg-AD mouse model of Alzheimer’s disease associated with brain weight //Frontiers in Aging Neuroscience. – 2021. – Т. 13. – С. 720214). IntelliCage позволяет осуществлять автоматизированный когнитивный и поведенческий скрининг мутантных и подверженных воздействию грызунов, живущих в социальных группах. В системе IntelliCage минимизируется влияние присутствия экспериментатора на поведение подопытных животных для наблюдения нормального социального поведения грызунов в естественной среде.
[4]К недостаткам аппарата следует отнести высокую цену устройства на российском рынке, а также закрытую систему, требующую долгой предварительной настройки.
[5]Известно устройство для тестирования животных для проведения поведенческого теста тестового животного, включающее: клетку, определяющую среду обитания тестового животного; камеру, в которую тестовое животное может войти, съемно прикрепленную к клетке; тестовый блок, расположенный в камере, представляющий проблему для тестового животного, вошедшего в камеру, обнаруживающий реакцию тестового животного на проблему и получающий данные о реакции; устройство измерения положения, которое измеряет положение тестового животного в клетке и камере и получает данные о положении тестового животного;
блок хранения данных, который сохраняет данные об ответе и данные о положении в качестве тестовых данных; и блок улучшения проблемы, который улучшает проблему, представленную тестовым блоком, на основе тестовых данных (US20160120153 опубл. 2016-05-05, МПК A01K 1/03). Устройство может автоматически оптимизировать тесты, проводимые для испытаний на животных.
[6]Известно также экспериментальное устройство для направления мыши на поиск платформы эвакуации с помощью визуальных подсказок (см. патент CN113384231, МПК A61B3/02, опубл. 09.06.2023), которое содержит основание с круглым резервуаром для воды, центральную платформу, платформу для эвакуации и светодиод; мерцание светодиода используется в качестве визуальной подсказки, так что экспериментальная мышь направляется к платформе для эвакуации, и побег осуществляется; и визуальная функция экспериментального устройства заключается в том, что оно содержит мышь, которая может быть количественно проанализирована в соответствии с записанным временем побега.
[7]Недостатком данного устройства является сложная система, обладающая большими размера и не имеющая возможности быть воспроизведенной в большом количестве устройств для серийных измерений.
[8]Известно устройство для тестирования автономного социального поведения мелких животных (см. патент CN112237156, МПК A01K1/03, опубл. 22.07.2022), которое содержит испытательный бункер, передний патрубок для хранения объектов и задний патрубок для хранения объектов расположены на двух внешних стенках испытательного бункера соответственно, передний патрубок для хранения объектов и задний патрубок для хранения объектов отделены от внутренней части испытательного бункера разделительными сетками из железной проволоки и направляющим рельсом. На боковой стенке испытательного бункера расположены паз, подъемная дверца и подъемный механизм, приводящий в движение подъемную дверцу для подъема и опускания. Подъемный механизм содержит двигатель, две стороны подъемной дверцы вставлены во вставной паз направляющей рейки, микропереключатель расположен на внутренней стенке испытательного бункера, микропереключатель электрически соединен с подъемным механизмом, микропереключатель электрически соединен со счетчиком, а микропереключатель и измерительный прибор электрически соединены друг с другом. Двигатель электрически соединен с цепью управления дверью; а схема управления дверью содержит реле отключения с временной задержкой, контроллер прямого и обратного вращения двигателя, реле управления с временной задержкой, скользящий реостат и инфракрасную камеру.
[9]Недостатком данного устройства является малое количество параметров, позволяющих сделать анализ когнитивных способностей подопытных животных.
[10]Наиболее близкой к предлагаемой является система автоматизированного управления обучением животных и дискриминационным навыкам (см патент US11369093, МПК A61K39/00, опубл. 28.06.2022), основанный на анализе поведения и обучения животных). Система мониторинга для отслеживания перемещения одного или нескольких животных, содержиткорпус, сконфигурированный для содержания одного или нескольких животных; множество датчиков приближения, расположенных внутри корпуса и сконфигурированных для обнаружения присутствия одного или нескольких животных в целевом месте и, по меньшей мере, в одном другом месте; систему подачи корма, сконфигурированную для доставки пищевого вознаграждения в корпус; камеру, сконфигурированную для записи одного или нескольких животных в корпусе; по меньшей мере одно устройство слухового стимула, сконфигурированное для подачи звукового стимула в ответ на обнаружение присутствия одного или нескольких животных в целевом месте; по меньшей мере одно устройство светового стимула, сконфигурированное для подачи светового стимула в ответ на обнаружение присутствия одного или нескольких животных в целевом месте; и систему управления, сконфигурированную для получения входного сигнала по меньшей мере от одного из множества датчиков приближения и управления доставкой пищевого вознаграждения из системы подачи корма на основе входного сигнала, при этом корпус содержит аквариум. Множество датчиков приближения включают отражатель, который настроен на обнаружение присутствия одного или нескольких животных в целевом местоположении при прерывании сигнала к отражателю. Система подачи включает часть, содержащую пищу, и элемент доставки пищи, который при получении сигнала доставки пищи от системы управления вызывает доставку пищевого вознаграждения из части, содержащей пищу, в ограждение. Система подачи включает позиционирующий элемент, который сконфигурирован для перемещения элемента доставки пищи из первого положения во второе положение, причем перемещение из первого положения во второе положение позволяет доставлять пищевое вознаграждение в различные области ограждения, а система подачи сконфигурирована для получения позиционирующего сигнала от системы управления для регулировки местоположения элемента доставки пищи. Позиционирующий элемент содержит один или несколько двигателей, которые сконфигурированы для регулировки местоположения элемента подачи пищи путем вращения рычага подачи.
[11]Недостатком данного устройства является отсутствие гибкой настройки условий эксперимента и контроля нескольких устройств одновременно. Согласно тексту патента, для улучшения качества измерений используется отслеживание движений животного при помощи камеры.
[12]Раскрытие сущности полезной модели
[13]Технической проблемой является разработка автоматизированного устройства, позволяющего проводить взаимодействие с лабораторными животными для изучения их поведения при обучении.
[14]Технический результат заключается в расширении арсенала средств для оценки когнитивных способностей животных при увеличении скорости и точности обучения.
[15]Технический результат достигается тем, что в устройстве для оперантного обусловливания мелких лабораторных животных, содержащем корпус, внутри которого расположены инфракрасные датчики для обнаружения присутствия животного в целевом месте, автоматический модуль подачи корма и систему управления устройством, согласно решению, в нижней части передней стенки корпуса выполнены три отверстия и расположен рычаг для взаимодействия с животным, над крайними отверстиями расположены LED-светодиоды, инфракрасные датчики для обнаружения присутствия животного размещены в отсеках в нижней части корпуса напротив крайних отверстий, модуль для подачи корма подведен к центральному отверстию, система управления устройством и передачи результатов на компьютер представляет собой плату с микроконтроллером, встроенную в заднюю стенку корпуса. Автоматический модуль подачи корма включает кормушку, соединенную с ротором для сброса корма по направляющей в отсек напротив центрального отверстия, управляемым шаговым двигателем, при этом драйвер шагового двигателя установлен на задней стенке корпуса. Задняя стенка корпуса выполнена съемной и прикреплена к корпусу с помощью магнитов, расположенных в углах. Корпус выполнен из непрозрачного PLA пластика. Отсеки для крепления инфракрасных датчиков являются сменными и крепятся к корпусу по системе “ласточкин хвост”.
[16]Краткое описание чертежей
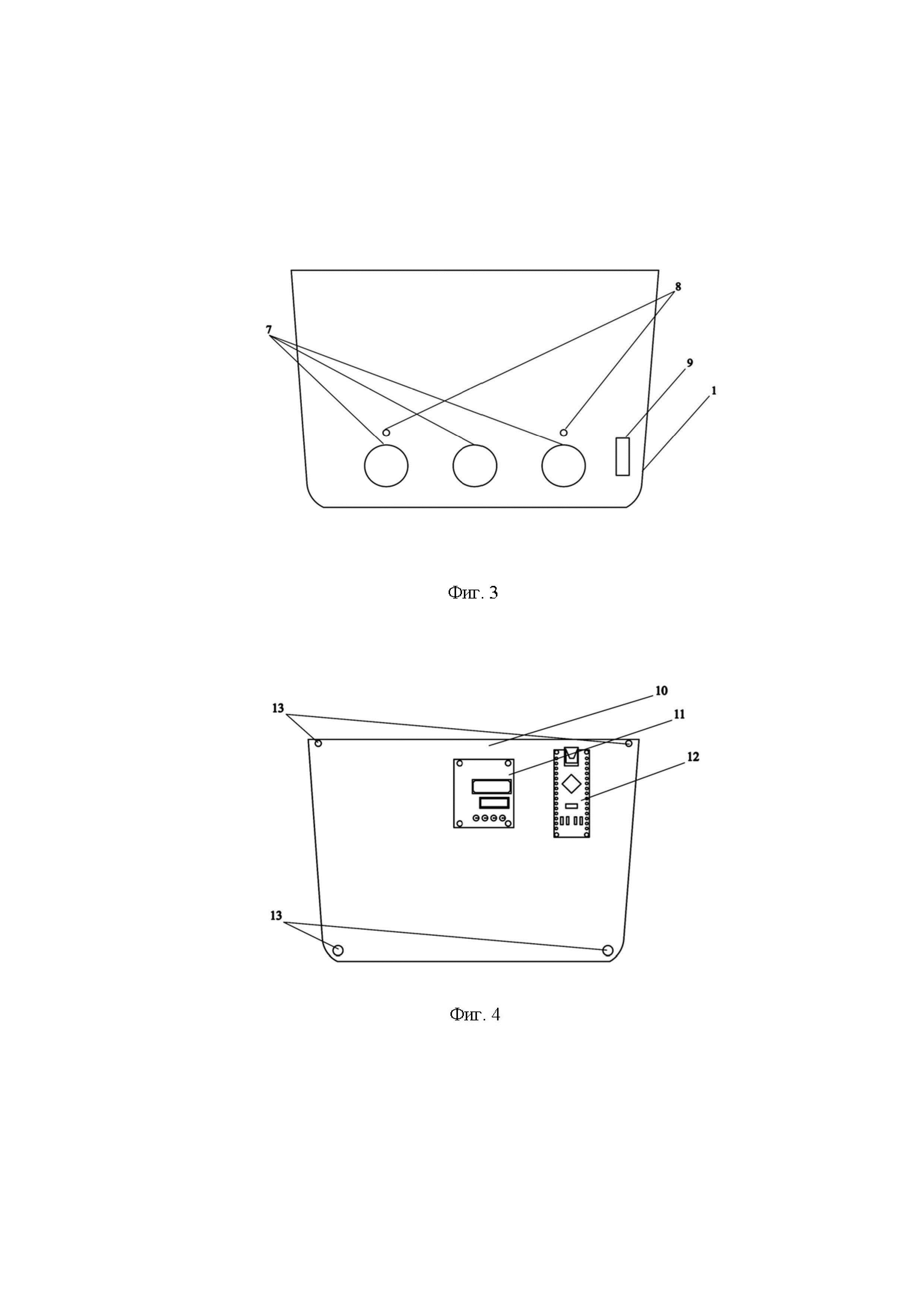
[17]Полезная модель поясняется чертежами, на фиг. 1 – приведен общий вид устройства; на фиг. 2 - модуль автоматической подачи корма; на фиг. 3 – передняя стенка корпуса; на фиг. 4 – задняя стенка корпуса.
[18]Позициями на чертежах обозначено:
[22]4. шаговый двигатель;
[23]5. инфракрасные датчики;
[24]6. отсеки для крепления датчиков;
[25]7. отверстия в передней стенке корпуса для взаимодействия с лабораторным животным;
[27]9. рычаг для нажатия;
[28]10. задняя стенка корпуса;
[29]11. драйвер шагового двигателя;
[32]14. отсек для подачи корма.
[33]Осуществление полезной модели
[34]Устройство представляет собой оперантную камеру, которую помещают в лабораторную клетку (фиг. 1). Оно содержит корпус 1, выполненный из PLA пластика. Выбор данного пластика обусловлен легкостью изготовления корпуса, оптимальными свойствами пластика для очистки корпуса, а его непрозрачность препятствует отвлечению лабораторного животного на раздражители. Внутри корпуса устройства расположен модуль для автоматической подачи корма, состоящий из кормушки 2, соединенной с вертикально расположенным ротором 3 в корпусе из PLA пластика, на котором закреплен шаговый двигатель 4, используемый для поворота ротора 3 и выдачи точной порции корма в отсек 14 по стенкам корпуса ротора. Ротор 3 имеет 8 лопастей, каждая из которых позволяет взять точный объем корма, и поворачивается на 45 градусов для сброса корма в отсек 14, совмещенный с модулем. Устройство содержит инфракрасные датчики 5, размещенные в отсеках для крепления датчиков 6 в нижней части корпуса 1. Инфракрасные датчики 5 используются для обнаружения помещения носа лабораторного животного в одно из крайних отверстий устройства. Отсеки для крепления инфракрасных датчиков 6 являются сменными и крепятся к корпусу по системе “ласточкин хвост”. В передней стенке корпуса 1 выполнены три отверстия 7 для взаимодействия с лабораторным животным. Модуль для автоматической подачи корма подведен к центральному отверстию и предназначен для осуществления пищевого подкрепления лабораторного животного кормом в случае выбора верного отверстия (фиг. 2).
[35]Над крайними отверстиями расположены LED светодиоды 8, которые предназначены для обозначения верного отверстия для выбора лабораторным животным. Выбор верного отверстия позволяет закрепить условный рефлекс лабораторного животного путем получения пищевого подкрепления в случае правильного выбора.
[36]Отсеки 6 расположены напротив крайних отверстий. В нижней правой части устройства закреплен рычаг для нажатия 9 (фиг. 3). Он позволяет получить более точные результаты эксперимента путем предоставления нескольких задач для лабораторного животного. На задней стенке 10 корпуса 1 установлен драйвер шагового двигателя 11 (фиг. 4), в стенку также встроена плата с микроконтроллером Arduino Nano 12, осуществляющая управление устройством и передающая результаты на компьютер. Драйвер шагового двигателя 11 позволяет осуществить точное управление шаговым двигателем 4, он подключен к плате с микроконтроллером 12. Плата с микроконтроллером 12 осуществляет управление устройством: задает условия горения LED светодиодов 8 согласно эксперименту, принимает сигнал с инфракрасных датчиков 5, управляет шаговым двигателем 4 через драйвер шагового двигателя 11 и передает все полученные данные на персональный компьютер, к которому она подключена. Задняя стенка устройства 10 представляет собой плоскую пластину, выполненную из непрозрачного PLA пластика. По ее краям закреплены магниты 13 с диаметром 3 мм в верхней части и 5 мм в нижней части, используемые для крепления задней стенки 10 к корпусу устройства 1, что позволяет быстро снять заднюю стенку 10 и получить доступ к основным техническим узлам устройства. Устройство позволяет проводить оперантное обусловливание в соответствии с сигналами. В качестве сигналов используются LED-светодиоды 8. Задачей для животного является выбор правильного отверстия 7 или нажатие на рычаг 9. Так, если мелкое лабораторное животное помещает свою голову в правильное отверстие 7, которое является одним из крайних, инфракрасный датчик 5 регистрирует это и отправляет сигнал на плату с микроконтроллером 12. Плата с микроконтроллером 12 управляет устройством, включает модуль для активной подачи корма и животное получает дозированную порцию корма в качестве пищевого подкрепления в центральном отверстии. После этого информация направляется на персональный компьютер, с которым плата с микроконтроллером 12 соединена через USB-интерфейс. В случае выбора лабораторным животным неправильного отверстия не происходит выдачи дозированной порции корма, информация об этом направляется на персональный компьютер через плату с микроконтроллером 12. На компьютере задают время и условия эксперимента. В конце результаты предоставляются в виде txt-файла.
[37]Процедура обучения. За 24 часа до начала обучения лабораторное животное подвергается пищевой или питьевой депривации. Затем животное помещается в подготовленную лабораторную клетку с размещенным в ней устройством. В течение 30 минут животное находится в одной клетке с устройством, которое автоматически предоставляло пищевое подкрепление в качестве награды на выбор любого отверстия из двух крайних. Эту процедуру проводят до уверенного обучения животных получать подкрепление в кормушке. В среднем необходимо от 7 до 10 обучающих сессий. После закрепления опыта животное снова помещается в лабораторную клетку с устройством. Выставляются настройки, по которым LED-светодиод 8 загорается только над одним из двух крайних отверстий, где установлены инфракрасные датчики 5. Время регистрации правильного выбора, загорания LED-светодиодов 8 и выбор отдельного LED-светодиода 8 для загорания настраивается при помощи управления устройством через плату с микроконтроллером 12. Такая вариативность позволяет задавать различные условия эксперимента для получения более точных результатов. После прохождения тестов с LED-светодиодами 8 включается регистрация сигнала с рычага для нажатия 9. Все LED-светодиоды 8 загораются, сигнализируя о правильности выбора. В случае нажатия на рычаг 9 лабораторное животное получает корм в качестве подкрепления.
[38]Устройство предназначено для тестирования лабораторных при обеспечении высокого комфорта для животных и снижении нагрузки на операторов до минимума. Одновременная работа с неограниченным числом устройств в системе позволяет масштабировать эксперименты и исследования с большими группами животных. Устройство позволяет проводить анализ времени реакции, времени обучения, общего времени достижения цели и количества ошибок.



{kind=link}
{kind=link}