[1]Полезная модель относится к универсальным роботизированным ячейкам (УРЯ) для обслуживания оборудования. УРЯ предназначены для установки заготовок и выгрузки готовых деталей из любых типов технологического оборудования, осуществляющего серийную обработку деталей весом до 90 кг, имеющего возможность обеспечить автоматизированный доступ робота в рабочую зону, фиксацию и разжим заготовки, запуск и остановку работы оборудования.
[2]Универсальность ячейки заключается в том, что одна и та же ячейка может работать как с различными типами заготовок (в определенном диапазоне массо-габаритных характеристик), так и с различными типами оборудования, позволяя осуществлять процесс переналадки в максимально короткие сроки.
[3]В первую очередь, такие ячейки предназначены для обслуживания металлообрабатывающих станков с ЧПУ, таких как:
[4]- токарные и токарно-фрезерные станки с ЧПУ;
[5]- фрезерные обрабатывающие центры с ЧПУ;
[6]- шлифовальные станки с ЧПУ;
[7]- электроэрозионные станки с ЧПУ.
[8]Также ячейки могут быть использованы для обслуживания:
[9]- оборудования для термообработки;
[10]- оборудования для нанесения покрытий;
[11]- измерительного оборудования;
[12]- прессового оборудования;
[13]- аддитивного оборудования.
[14]Из уровня техники известна роботизированная ячейка для манипуляционных устройств (DE 20003638 U1). Изобретение относится к роботизированной ячейке для погрузочно-разгрузочных устройств, в частности промышленных роботов. Промышленный робот прикручен к промежуточной опорной плите. Опорная плита, в свою очередь, крепится к полу стяжными стержнями или винтами. В угловой области опорной плиты расположена арматура, выполненная в виде рамы или прямоугольной трубы, которая также служит кабельным каналом для линий электропередачи, например, для электрических, гидравлических и пневматических приводов промышленного робота. Недостатком данного решения является его не мобильность и не универсальность.
[15]Также известно решение FR 3104053 В1, в котором раскрыто универсальное роботизированное устройство для загрузки и разгрузки токарных станков с цифровым управлением, которое можно в любой момент разместить на эталонном токарном станке без необходимости адаптации устройств, при этом робот перемещается независимо в цеху и автоматически подключается к токарным станкам, к которым он привязан, в то время как он запускает и выполняет производственные заказы на устройствах, на которые он направляется. Устройство характеризуется системой отсчета, оснащенной механической блокировкой и электрическими соединениями с объектом управления позиционированием робототехнической системы. Мобильный робот, состоит из платформы, оборудованной самоходной системой передвижения с автономным источником питания, на которой размещен трехосный модуль регулировки положения робота, на котором размещен робот-манипулятор, командный шкаф управления и механическое устройство для захвата различны инструментов, а также необработанных и обработанных деталей. Недостатком данного решения также является его не достаточная функциональность.
[16]Известно решение RU 208600 U1 (принято за прототип). Роботизированная ячейка содержит робота, размещенного на столе для его позиционирования, который закреплен на каркасе с обшивкой, установленном на колесах с виброопорами, пульт управления, прикрепленный к упомянутому столу, и встроенный шкаф управления, имеющий ручки. При этом она снабжена модульным каркасом для установки периферийного оборудования, закрепленным под столом для позиционирования робота, и столом для позиционирования деталей и периферийных устройств, прикрепленным к столу для позиционирования робота и расположенным с ним в одной плоскости, при этом встроенный шкаф управления снабжен замком и заглушками для проводов и периферийных устройств, а листы обшивки выполнены съемными. Недостатком данного решения является его не достаточные эксплуатационные возможности.
[17]Технической задачей заявляемой полезной модели является расширение эксплуатационных возможностей устройства. Техническим результатом является повышение уровня досягаемости роботом внутреннего пространства оборудования.
[18]Технический результат достигается тем, что роботизированная ячейка, содержит робота, закрепленного к тумбе для его позиционирования, установленной на колесах, пульт управления, прикрепленный к упомянутой тумбе, и электрошкаф управления ячейкой. Робот устанавливается на кронштейне для базирования робота, закрепленном па боковой стенке тумбы, при этом плоскость монтажа робота расположена под углом к горизонту, а на верхней плоскости тумбы расположены опоры для установки приспособления для базирования деталей.
[19]Тумба представляет из себя сварной каркас из металлического профиля, со всех сторон закрытый панелями из листового металла, а с каждой из четырех боковых сторон тумбы находятся дверцы, обеспечивающие прямой доступ к оборудованию, установленному внутри тумбы.
[20]Колеса, на которых установлена тумба, представляют из себя комбинированные колеса-опоры.
[21]Пульт управления прикреплен к тумбе посредством металлического кронштейна, прикрепленного к фронтальной стенке тумбы.
[22]На кронштейне для базирования робота закреплен кронштейн для пульта робота.
[23]Устройство иллюстрируется следующими фигурами:
[24]Фиг. 1 - Общий вид универсальной роботизированной ячейки для обслуживания оборудования.
[25]Фиг. 2 - Общий вид тумбы в составе роботизированной ячейки для обслуживания оборудования.
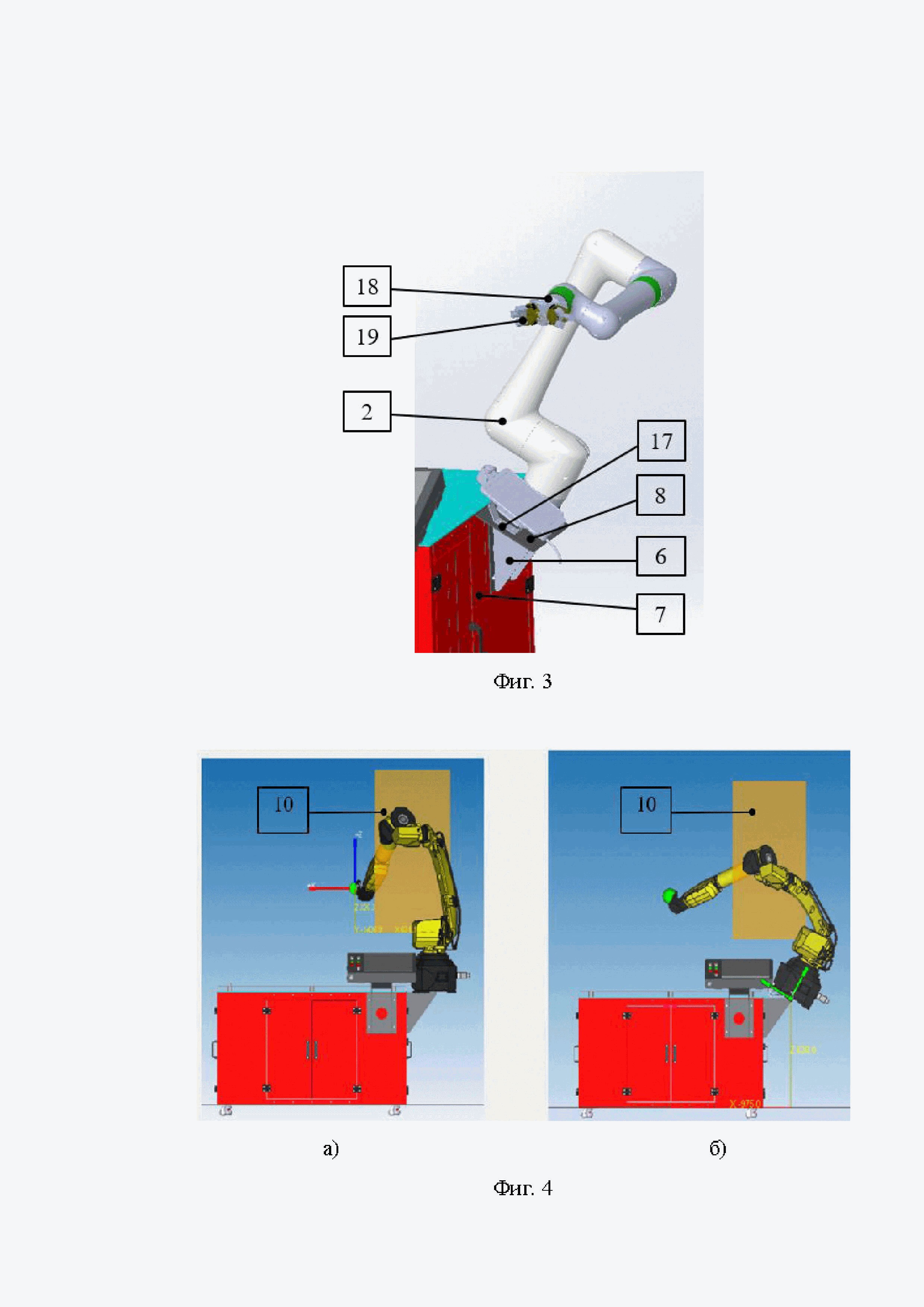
[26]Фиг. 3 - Общий вид робота в составе роботизированной ячейки для обслуживания оборудования.
[27]Фиг. 4 - Различия в досягаемости при горизонтальной а) и наклонной б) установке робота.
[28]Фиг. 5 а) б) - Досягаемость крайних точек тумбы при наклонной установке робота.
[29]Фиг. 6 - Положение ячейки относительно условной двери станка для достижения одной и той же точки в рабочей зоне станка при горизонтальной а) и наклонной б) установке робота.
[30]Фиг. 7 - Общий вид фрезерного станка.
[31]Роботизированная ячейка (1) содержит робота (2), закрепленного к тумбе (3) для его позиционирования. Тумба (3) установлена на колесах (4). Пульт управления (5) прикреплен к тумбе (3). Электрошкаф управления ячейкой закреплен во внутреннем пространстве тумбы (3) (на чертежах условно не показан). Робот установлен на кронштейне для базирования робота (6), закрепленном на боковой стенке (7) тумбы (3). Плоскость монтажа кронштейна (8) робота (2) расположена под углом к горизонту. Плоскость монтажа робота расположена под углом в диапазоне от 30 до 45 градусов для улучшения досягаемости роботом внутреннего пространства обслуживаемого оборудования (станков с ЧПУ) (фиг. 1, 2). Диапазон от 30 до 45 градусов является оптимальным из технологических соображений, а также согласно результатам геометрических расчетов досягаемости робота с использованием 3Д-моделирования. Исполнения с углом наклона менее 30 градусов не дают достаточного улучшения досягаемости внутреннего пространства обслуживаемого оборудования. Исполнения с углом наклона более 45 градусов имеют затрудненную досягаемость крайних точек рабочего стола ячейки, в связи с чем снижается максимальное количество заготовок, размещаемых на рабочем столе.
[32]Оптимальный угол в указанном диапазоне выбирается, исходя из массо-габаритных характеристик, досягаемости робота, а также геометрии рабочего пространства обслуживаемого оборудования.
[33]Благодаря тому, что робот монтируется на специальном кронштейне, вынесенном за основной габарит тумбы (фиг. 3), вся верхняя поверхность тумбы может быть использована для установки деталей, таким образом, увеличивается количество деталей, которые могу быть загружены в ячейку, а также время автономной работы ячейки. Благодаря тому, что плоскость монтажа робота расположена под углом, значительно улучшается досягаемость робота во внутреннее пространство обслуживаемого оборудования. Таким образом, робот, установленный под наклоном (фиг. 4 б)), может достигать поверхностей в рабочей зоне оборудования, через дверь (10) в рабочую зону (показана условно), до которых не сможет дотянуться робот, установленный горизонтально (фиг. 4 а)). При наклонной установке досягаемость роботом крайних точек тумбы не страдает (фиг. 5 а), б)).
[34]Кроме того, за счет улучшения досягаемости при наклонной установке робота, пользователь получает возможность установить ячейку значительно дальше (примерно на 400 мм при угле наклона в 30 градусов для выбранной конфигурации ячейки) от двери и пульта управления стайка. На фиг. 6 показано, что ячейка с наклонным расположением робота (б)) может быть расположена примерно на 400 мм. левее, от двери (10) (показана условно) в рабочую зону станка, чем ячейка с горизонтальным расположением робота (а)).
[35]Таким образом, оператор получает возможность простого, удобного и безопасного доступа к органам управления и рабочей зоне станка для его обслуживания, переналадки, работы в режиме без задействования ячейки. На фиг. 7 представлен пример общего вида фрезерного станка с расположением органов управления (9) и двери (10).
[36]На верхней плоскости (11) тумбы (3) расположены опоры (12) для установки приспособления для базирования деталей (фиг. 2).
[37]Приспособление для базирования деталей монтируется на опоры на верхней поверхности тумбы, занимает всю верхнюю поверхность тумбы и может быть установлено как горизонтально, так и под углом, в отличии от приспособления для базирования деталей, которое монтируется на каркас ячейки, при этом занимает часть верхней поверхности тумбы и устанавливается горизонтально.
[38]Благодаря тому, что приспособление для базирования деталей занимает всю верхнюю поверхность тумбы, поскольку робот установлен на кронштейне (6) для базирования робота, закрепленном на боковой стенке (7) тумбы (3), увеличивается количество деталей, которые могу быть загружены в ячейку, а также время автономной работы ячейки. Благодаря возможности наклонной установки приспособления для базирования деталей, базирование может осуществляться за счет силы тяжести. Таким образом, появляется возможность использовать одно и то же приспособление для нескольких типоразмеров деталей, упрощая переналадку и удешевляя эксплуатацию ячейки (нет необходимости изготавливать отдельное приспособление под каждый типоразмер детали).
[39]Тумба (3) представляет из себя сварной каркас (условно не показан) из металлического профиля, со всех сторон закрытый панелями (13) из листового металла, приваренными к каркасу, а с каждой из четырех боковых сторон тумбы (3) находятся дверцы различной конфигурации (14), обеспечивающие прямой доступ к оборудованию, установленному внутри тумбы (3) (фиг. 2).
[40]К оборудованию относятся:
[42]- электрошкаф управления ячейкой;
[43]- элементы пневматической системы;
[44]- прочее периферийное оборудование, подбираемое из условий конкретного случая применения ячейки.
[45]Все вышеперечисленное оборудование монтируется на соответствующие посадочные места и закрепляется при помощи резьбовых соединений.
[46]Выполнение конструкции каркаса сварной из стального профиля позволяет достичь более высокой экономической эффективности (более дешево в реализации), а также более высокой прочности и нагрузочной способности, по сравнению с альтернативным решением (например, выполнение конструкции из алюминиевого профиля на болтовых соединениях).
[47]Благодаря более высокой нагрузочной способности, на сварном каркасе из стального профиля можно реализовать широкую номенклатуру ячеек, отличающихся используемой моделью робота-манипулятора, выбираемого по грузоподъемности, обеспечивающих работу с заготовками весом до 90 кг.
[48]Колеса (4), на которых установлена тумба (3), представляют из себя комбинированные колеса-опоры.
[49]Использование колес, совмещенных с опорами, делает ячейку более гибкой и простой в обращении в условиях производства - ее можно переместить от одной единицы оборудования к другой без необходимости использовать специальные подъемные или транспортные устройства (тележки, краны и т.п.), а после перемещения обеспечить устойчивое базирование для выполнения своей функции.
[50]Пульт управления (5) прикреплен к тумбе (3) посредством металлического кронштейна (15), прикрепленного к фронтальной стенке (16) тумбы (3). Посредством пульта управления ячейкой оператор получает доступ к специализированному программному обеспечению, позволяющему в простом диалоговом режиме осуществлять программирование, настройку, обслуживание и диагностику ячейки, управлять роботом в ручном режиме. Благодаря данному программному обеспечению производится гибкая переналадка ячейки на работу с различными типами деталей.
[51]На кронштейне (6) для базирования робота (2) закреплен кронштейн для пульта робота (17). На фланце робота через переходной фланец (18) устанавливается одинарный или двойной пневматический захват (19).
[52]Благодаря тому, что пульт управления роботом монтируется на кронштейн для базирования робота, в отличие от монтирования пульта па стол, не занимается дополнительное место на поверхности стола, что позволяет увеличить количество деталей, загружаемых в ячейку и время автономной работы ячейки.
[53]Одна роботизированная ячейка может использоваться как для обслуживания одной единицы оборудования, так и для обслуживания нескольких единиц.
[54]Оборудование, обслуживаемое роботизированной ячейкой, должно быть оснащено системой управления па базе УЧПУ (устройство числового программного управления), либо промышленного контроллера, позволяющего обмениваться сигналами с контроллером ячейки, и выполнять в автоматическом режиме следующие операции:
[55]- предоставлять роботу доступ в рабочую зону (в случае установки ячейки вне огражденной рабочей зоны): открытие / закрытие двери, отвод ограждений и т.п.;
[56]- осуществлять фиксацию / расфиксацию заготовки (в случае, если технологический процесс требует фиксации);
[57]- осуществлять запуск и остановку выполнения технологических операций в автоматическом режиме по команде от контроллера ячейки;
[58]- сообщать контроллеру ячейки о готовности к загрузке/снятию заготовки, о возникающих ошибках и аварийных состояниях;
[59]К ключевым задачам роботизированной ячейки для обслуживания оборудования можно отнести следующие:
[60]- обеспечение стабильного вспомогательного времени оборудования (времени на установку заготовки) и как следствие стабильного времени цикла на изготовление одной детали;
[61]- обеспечение автономной работы оборудования без необходимости постоянного присутствия человека для установки заготовок / снятия деталей;
[62]- снижение процента брака, связанного с некорректной установкой или базированием заготовки.


{kind=link}
{kind=link}
{kind=link}
{kind=link}