[1]Человеческая деятельность все больше и больше сталкивается с применением радиоактивных, химических и токсических веществ, что создает условия для их непредвиденного попадания в окружающую среду. Такие происшествия случаются на атомных и химических производствах, при транспортировке опасных грузов различными средствами, при их хранении и обращении с ними. Ликвидация последствий указанных ЧС требует присутствия и работы специалистов в опасных условиях. Аварийно-спасательные формирования должны входить на аварийную территорию, эвакуировать оттуда людей, оказывать помощь пострадавшим, удалять вредные вещества и опасные фрагменты, разбирать либо укреплять поврежденные строительные конструкции и т.п. Таким образом, спасатели вынуждены действовать в условиях, опасных для жизни, причем большая часть работ связана с выполнением рутинных операций [см. Батанов, А.Ф. Робототехнические комплексы для обеспечения специальных операций [Электронный ресурс] / А.Ф. Батанов, С.Н. Грицынин, С.В. Муркин // Специальная техника. - 1999. - №6. - Режим доступа: http://www.ess.ru/sites/default/files/files/articles/1999/06/1999_06_02.pdf].
[2]Аварийно-спасательные работы (АСР) - это действия по спасению людей, материальных и культурных ценностей, защите природной среды в зонах ЧС и при ведении военных действий, локализации и одавлению или доведению до минимально возможного уровня воздействия характерных для них опасных факторов.
[3]Аварийно-спасательные работы характеризуются наличием факторов, угрожающих жизни и здоровью проводящих эти работы людей, и требуют их специальной подготовки, экипировки и оснащения [см. Организация и ведение гражданской обороны и защиты населения и территорий от чрезвычайных ситуаций природного и техногенного характера: Учебное пособие / Под общ. ред. Г.Н. Кириллова. - 7-е изд., переем. - М.: Институт риска и безопасности, 2011 - 536 с.].
[4]Содержание аварийно-спасательных работ:
[5]ведение разведки маршрутов выдвижения формирований и участков (объектов) работ;
[6]локализация и тушение пожаров на участках (объектах) работ и путях выдвижения к ним;
[7]розыск пораженных, извлечение их из поврежденных и горящих зданий, завалов, загазованных, затопленных и задымленных помещений;
[8]вскрытие разрушенных, поврежденных и заваленных защитных сооружений и спасение находящихся в них людей;
[9]подача воздуха в заваленные защитные сооружения;
[10]оказание первой медицинской и первой врачебной помощи пораженным и эвакуация их в лечебные учреждения;
[11]вывод (вывоз) населения из опасных мест в безопасные районы;
[12]санитарная обработка людей и обеззараживание, дезактивация их одежды, территории, сооружений, техники, продовольствия, воды.
[13]Для защиты личного состава от воздействия опасных факторов пожара, ядовитых веществ и радиоактивного излучения применяются различные групповые и индивидуальные средства защиты. Однако в экстремальных условиях пожаров и ЧС эти средства часто не обеспечивают надежной защиты спасателей, т.е. непосредственное участие человека в тушении пожара сопряжено с определенной степенью риска.
[14]Перспективным направлением совершенствования техники тушения пожаров и проведения АСР на объектах экономики и инфраструктуры, обеспечения безопасности спасателей в экстремальных условиях является широкое внедрение пожарных роботов [см. Микеев А.К. Противопожарная защита АЭС. - М.: Энергоатомиздат, 1990. - 432 с.].
[15]Действительно, первоначально в промышленной сфере мобильные робототехнические комплексы (МРК) получили распространение в атомной промышленности, на атомных электростанциях (АЭС). В настоящее время такие системы разработаны для применения при тушении пожаров, ликвидации последствий аварий с опасными веществами на всех видах транспорта, на химических производствах, при разборке завалов, образовавшихся в результате землетрясений, в общем, во всех случаях, где имеет место опасность существенного риска для занятых в этих работах людей.
[16]Для тушения пожаров применяются разнообразные пожарные МРК. В зависимости от назначения они оборудуются водяными помпами, модулями пенного, порошкового тушения и т.п., автономными дизель-генераторными установками, набором абсорбентов химических веществ, информационными системами, средствами связи и многими другими видами оборудования.
[17]Так, мобильный робототехнический комплекс разведки и пожаротушения легкого класса (МРК-РП) предназначен для проведения разведок как внутри помещения, так и на местности с помощью систем видеоконтроля, поиска и устранения очагов возгорания, непосредственно выполнения пожаротушения и локализации опасных зон, т.е. в условиях высокоинтенсивных тепловых потоков и значительного уровня радиации, отягощенных химическим и радиационным загрязнением [см. Комплекс мобильный робототехнический. Руководство по эксплуатации. НТ598.00.00.000 РЭ. Утвержден НТ598.00.00.000РЭ - ЛУ. - М: ВНИИПО МЧС России, - 85 с.].
[19]связь со штатной системой управления;
[20]обнаружение препятствий и построение карты местности с отображением непроходимых участков;
[21]трехмерную визуализацию РТК с отображением текущего положения его подвижных частей;
[22]слежение за температурным состоянием окружающей обстановки с указанием величины теплового потока с соответствующей стороны в цветовой градации;
[23]автономный возврат робота при потере связи или по команде оператора по ранее пройденной траектории;
[24]блокировку действий оператора при перемещении робота в температурно-опасные зоны;
[25]автоматическое выведение манипулятора в транспортное или рабочее положение с помощью датчиков положения подвижных частей.
[26]В состав изделия МРК-РП (см. фиг.1) входят [см. ГОСТ Р 54344-2011 «Техника пожарная. Мобильные робототехнические комплексы для проведения аварийно-спасательных работ и пожаротушения. Классификация. Общие технические требования. Методы испытаний»]:
[27]мобильный робот - 1 в сборе;
[28]система энергообеспечения - условно не показана;
[29]средство доставки - 2 (автомобиль быстрого реагирования АБР-РОБОТ);
[30]средства связи оператора с координирующим (командным) постом управления - условно не показаны.
[31]Мобильный робот (MP) представляет собой (фиг.2) самоходное, управляемое дистанционно (по кабелю или по радио), гусеничное транспортное средство - 3 с манипулятором (МП) - 4, бортовой частью системы управления и телевизионной системой - 5, оснащаемое дополнительным сменным технологическим оборудованием, состав которого меняется в зависимости от выполняемой задачи.
[32]Возможная радиационная авария на объекте защиты в большинстве случаев будет сопровождаться выносом излучающих радиацию элементов за периметр (оболочку) защитного контура. Один из таких вариантов аварии может произойти с возникновением взрыва с последующим пожаром (примеры: аварии на Чернобыльской АЭС, Химкомбинате «Маяк» и др.). При взрыве радиоактивные элементы (фрагменты технологического оборудования и конструкций, изделий собственно с урановой составляющей и другими опасными элементами, возникающими в процессе распада и полураспада) разлетаются за счет взрывной волны и, исходя из анализа подобных ситуаций, будут располагаться относительно компактно по площади.
[33]Разведка в данном случае будет заключаться в отыскании радиоактивных осколков (в том числе с учетом уровня экспозиционной дозы) с одновременной дезактивацией (применительно к данному случаю это суть - удаление/вывоз радиоактивных фрагментов) [см. Приказ МЧС России от 16.10.2017 года №444 «Об утверждении Боевого устава подразделений пожарной охраны, определяющего порядок организации тушения пожаров и проведения аварийно-спасательных работ»]. Для работ с подобными предметами (осколками) на MP имеется манипулятор - 4 с комплектом сменных губок схвата - 6, с номинальной грузоподъемностью 30 кг и имеющий пять степеней свободы (подвижности) [см. Комплекс мобильный робототехнический. Руководство по эксплуатации. НТ598.00.00.000 РЭ. Утвержден НТ598.00.00.000РЭ - ЛУ. - М.: ВНИИПО МЧС России, - 85 с.]. Управление MP и манипулятором осуществляется оператором по радиосигналу (до 1000 м на открытой местности) или по кабельной линии длиной 100 м.
[34]Технической задачей заявляемой полезной модели является повышение функциональных возможностей и эффективность применения «Мобильного робота робототехнического комплекса разведки и пожаротушения легкого класса» при разведке и дезактивации посредством разработки конструктивно-технических решений по его дооснащению контейнером, предназначенным для складирования собранных с помощью штатного манипулятора радиоактивных и/или химически токсичных фрагментов изделий, оборудования и конструкций аварийного объекта и последующего их совместного транспортирования, т.е. удаления для дезактивации, что важно для минимизации времени проведения АСР и, причем без значительных затрат.
[35]Предлагаемый контейнер - 7 повысит тактико-технические возможности MP, поскольку обеспечит увеличение количества вывозимых токсичных фрагментов «за один раз», тем самым снизит количество порожних (холостых) пробегов MP и, в конечном счете, сократит время проведения АСР.
[36]Технике известны близкие по назначению мобильные машины и их рабочие органы, особенно в строительной сфере. К ним полагаем необходимым отнести агрегаты ковшового типа и машины для землеройных и землеройно-транспортных работ (экскаваторы, скреперы, погрузчики) с помощью которых перемещают не только грунт, но и строительно-монтажное оборудование, оснастку, орудия труда и т.п.
[37]В качестве прототипа заявителем выбрана конструкция трактора «Беларус-82» с фронтальным навесным погрузчиком и грейферной установкой [см. Машины для земляных работ: Учебник для студентов вузов по специальности «Подъемно-транспортные, строительные, дорожные машины и оборудование»/Д.П. Волков, В.Я. Крикун, П.Е. Тотолин и др.; под общ. ред. Д.П. Волкова. - М.: Машиностроение, 1992 - 448 с.].
[38]Очевидными недостатками такой мобильной специальной техники является то, что к работам в очаге радиоактивной аварии она ни по конструктивным решениям, ни по габаритным размерам, ни по примененным машиностроительным материалам не пригодна.
[39]Поставленная задача решилась тем, что для «Мобильного робота мобильного робототехнического комплекса разведки и пожаротушения легкого класса» сконструирован, изготовлен, апробирован и предлагается к применению съемный стальной контейнер - 7 специальной формы ковшового типа вместимостью порядка 10 дм3, грузоподъемностью 20 кг и весом 5 кг. Использование нержавеющей стали для создания контейнера предотвращает коррозию и увеличивает срок службы конструкции. Для исключения переполнения контейнера водой (например, при пожаротушении водными растворами или при работе в дождь) по обоим концам нижней части его конструкции предусмотрены дренажные отверстия щелевого типа.
[40]В конструкции контейнера - 7 предусмотрен отрицательный наклон его внешней стенки, что повышает параметры профильной проходимости MP в условиях завалов и разрушений, и, в частности, при его «вскарабкивании» на вертикальное препятствие, например ступеньку лестничного марша. Тогда, вследствие отрицательного наклона внешней стенки контейнера, она выполняет роль «лыжи» (т.е. внешняя стенка контейнера - аналог «лыжи» путепрокладчиков).
[41]А для исключения выпадения из контейнера собранных токсичных фрагментов, например, при его следовании вниз по склону лестничного марша, либо при резкой остановке Мобильного робота - 1, угол отрицательного наклона его внешней стенки относительно горизонта, после монтажа на MP, должен превышать величину допустимого угла дифферента Мобильного робота порядка на 10 градусов (фиг.2). Известен допустимый угол дифферента данного MP [см. Комплекс мобильный робототехнический. Руководство по эксплуатации. НТ598.00.00.000 РЭ. Утвержден НТ598.00.00.000РЭ-ЛУ. - М.: ВНИИПО МЧС России, - 85 с.] - не более 35 градусов. Отсюда, угол отрицательного наклона внешней стенки контейнера относительно горизонта, после его монтажа на MP должен быть не менее 45 градусов.
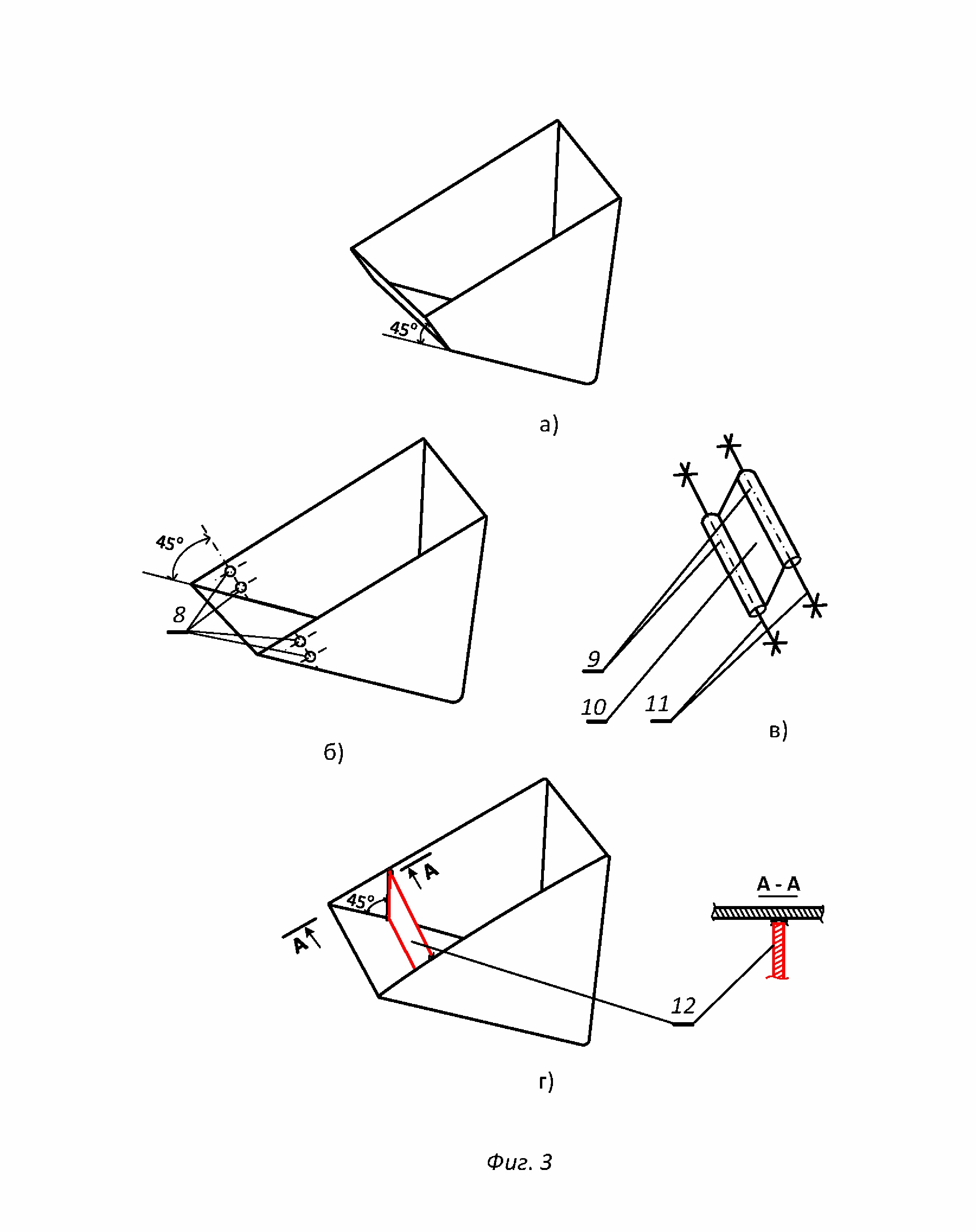
[42]Кроме того, для того, чтобы при движении MP гарантированно исключить выпадение собранных опасных фрагментов из контейнера предлагается в процессе его изготовления произвести отбортовку кромки его внешней стенки, т.е. загнуть ее на угол ~ 45° (см. фиг.3, вид а), с таким расчетом, чтобы данный буртик был шириной 50…60 мм.
[43]Второй вариант решения данного вопроса. С этой же целью в конструкции контейнера целесообразно предусмотреть заслонку, к примеру, каковая имеет место у ковша скрепера. В данном случае быстросъемная заслонка представляет собой сварную конструкцию из полосы - 10 и двух трубок - 9 (фиг.3, вид в), суммарной шириной 50…60 мм. Для ее размещения в обоих бортах контейнера следует просверлить четыре сквозных отверстия - 8 (фиг.3, вид б). Перед началом АСР сквозь стальные трубки, а также сквозь четыре отверстия - 8 в бортах необходимо вставить два стальных круглых прутка - 77 с резьбой на концах и гайками зафиксировать заслонку. При этом расположение отверстий на бортах таково, что указанная деталь в рабочем положении будет располагаться под углом ~ 45° к плоскости внешней стенки контейнера.
[44]Третий вариант решения вопроса. Или еще предлагается к внутренним сторонам правого и левого бортов контейнера приварить (фиг.3, вид г) по одному направляющему желобу каждый длиной 50…60 мм, которые расположить под углом ~ 45° к плоскости внешней стенки и которые предназначены для опускания по ним перед началом АСР легкосъемной стальной полосы - 12 шириной 50…60 мм и ее фиксацией.
[45]Мобильный робот робототехнического комплекса разведки и пожаротушения легкого класса работает следующим образом.
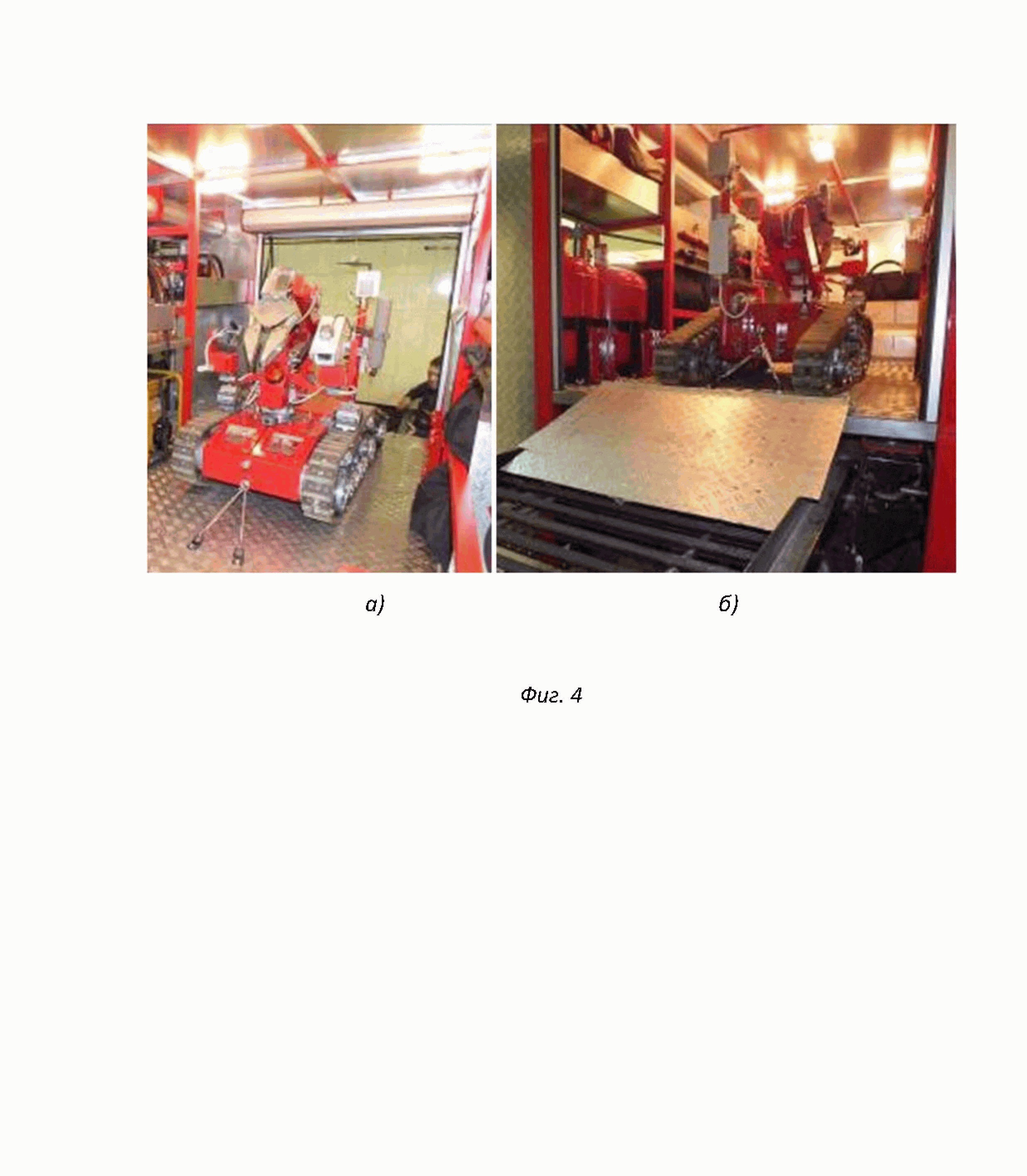
[46]При следовании оперативной спецтехники «Мобильный робот…» в составе МРК-РП размещается в фургоне автомобиля быстрого реагирования АБР-РОБОТ - 2 (см. фиг.1) [см. Комплекс мобильный робототехнический. Руководство по эксплуатации. НТ598.00.00.000 РЭ. Утвержден НТ598.00.00.000РЭ - ЛУ. - М.: ВНИИПО МЧС России, - 85 с.] и стопорится посредством талрепов, съемных растяжек, передних и задних рым-болтов (фиг.4, вид а). Перед транспортировкой комплекса контейнер необходимо демонтировать. Контейнер является быстросъемным и также быстро может быть установлен, поскольку для ввинчивания/вывинчивания рым-болтов какого-либо инструмента не требуется.
[47]По прибытии на место вызова производится расстопорение MP, для чего ослабляются и снимаются талрепы и съемные растяжки.
[48]Затем включается MP и, с применением технологического пульта управления, производится его самовыгрузка по штатной аппарели автомобиля «АБР-РОБОТ» (фиг.4, вид б).
[49]Далее MP следует установить на ровную поверхность и провести внешний осмотр с установкой обзорных телеустановок - 5 на манипуляторе - 4. Проверить степень зарядки аккумуляторов (не менее 12,8 В), а также проводятся еще ряд регламентных работ согласно инструкции по его эксплуатации [см. Комплекс мобильный робототехнический. Руководство по эксплуатации. НТ598.00.00.000 РЭ. Утвержден НТ598.00.00.000РЭ-ЛУ. - М.: ВНИИПО МЧС России, - 85 с.].
[50]Предлагаемый контейнер, (фиг.3) крепится к передней торцевой части силовой структуры корпуса MP посредством рым-болтов.
[51]После завершения указанных работ необходимо перевести тумблер «Питание» на панели управления MP в положение ВКЛ. Затем [см. Комплекс мобильный робототехнический. Руководство по эксплуатации. НТ598.00.00.000 РЭ. Утвержден НТ598.00.00.000РЭ-ЛУ. - М.: ВНИИПО МЧС России, - 85 с.] производят проверки на функционирование MP: в движении, манипулятора, телевизионной системы и дополнительного оборудования.
[52]МРК-РП включен и готов к работе. Включают комплекс в зависимости от задачи: при управлении по кабелю либо по радио. Режим управления - командный.
[53]Использование MP комплекса
[54]Скорость движения необходимо выбирать в зависимости от условий эксплуатации.
[55]По возможности, для поворота MP следует использовать ровные горизонтальные участки с твердым грунтом или вершины (гребни) неровностей.
[56]При движении по щебенке, гальке, снегу, песку, рыхлому грунту, глубокой колее следует производить минимальное количество поворотов, особенно крутых, во избежание забивания беговой дорожки грунтом, что может привести к спаданию гусениц или перегрузке двигателей мотор-звездочек.
[57]При движении задним ходом обзорную камеру необходимо навести так, чтобы иметь возможность контролировать положение кабеля во избежание наезда на него.
[58]При преодолении пороговых препятствий (вертикальной ступени, эскарпа, бордюра, шпалы и т.п.) рекомендуется расположить MP так, чтобы его продольная ось была перпендикулярна препятствию.
[59]Въезд на препятствие производить на минимальной скорости и остановить MP сразу после начала переваливания (как только поплыло изображение на мониторе). Продолжать движение только после соприкосновения гусениц с поверхностью площадки.
[60]На крутой (свыше 15°) подъем (с крутого спуска) с резким изломом въезжать (съезжать) на минимальной скорости, во избежание "клевка" и удара MP о поверхность площадки. Скорость увеличивать только после проезда MP через излом.
[61]При движении по продольному уклону (фиг.2) или лестнице рекомендуется развернуть манипулятор в сторону подъема и установить схват - 6 в положение максимального удаления от оси вращения манипулятора. На крутых косогорах двигаться тем медленнее, чем круче косогор, стараться избегать поворотов в сторону подъема.
[62]Поворотов на крутом спуске следует избегать. Если это невозможно, поворачивать MP плавно (с минимальной скоростью).
[63]Участки с тяжелым грунтом (жидкая грязь, мелкий сухой песок, глубокий снег) или залитые водой преодолевать наикратчайшим путем, совершая минимальное количество поворотов. В случае начала буксования отъехать назад по колее и двигаться в объезд.
[64]Подъем, транспортирование грузов и проведение специальных работ
[65]При работе с манипулятором оператору необходимо учитывать следующее:
[66]если масса груза близка к предельно допустимой (30 кг), подъем звеньев и поворот манипулятора - 4 выполнять с минимальной скоростью и амплитудой;
[67]длинные тяжелые предметы рекомендуется захватывать за среднюю часть, при манипуляциях такими предметами - избегать ударов о MP - 1.
[68]Зона обслуживания манипулятора - 4 определяется величиной вылета манипулятора - 1,5 м и ограничениями накладываемые конструктивными элементами MP.
[69]При транспортировании грузов в схвате манипулятора необходимо учитывать, что нагруженный MP - 1 более склонен к опрокидыванию на крутых спусках и к застреванию на участках с тяжелым грунтом.
[70]МРК-РП располагает четырьмя комплектами сменных губок:
[71]основные губки схвата - прямые,
[72]специальные губки - по захвату мелких предметов,
[74]губки для захвата цилиндрических предметов диаметрам от 50 до 200 мм.
[75]Опасный груз необходимо охватить губками схвата как можно ближе к центру масс. В MP схват отключается автоматически при зажатии детали до установленного нормируемого усилия 800 или 1000 Н. При этом предусмотрена механическая защита.
[76]По замыслу конструкторов MP подъезжает к нужной точке, с помощью видеокамер с визуальным позиционированием оператор, посредством манипулятора - 4, поднял (и удерживает) с поверхности (земли, пола и т.п.) радиоактивный фрагмент. Затем манипулятор осуществляет погрузку опасного предмета в контейнер MP, предлагаемой конструкции. И данная технологическая операция повторяется вновь и вновь. После заполнения контейнер робот едет в сторону утилизационного контейнера (который на фигурах условно не показан) для сбора и хранения представляющих опасность объектов. Таким образом, производится процесс очистки территории аварийного объекта от опасных предметов и материалов. В то же время необходимо учитывать, что аккумуляторная батарея обеспечивает время непрерывной работы MP в течение 4 часов [см. Комплекс мобильный робототехнический. Руководство по эксплуатации. НТ598.00.00.000 РЭ. Утвержден НТ598.00.00.000РЭ-ЛУ. - М.: ВНИИПО МЧС России, - 85 с.] - и это при положительной температуре окружающей среды. Следовательно, количество электроэнергии, запасенной в аккумуляторах, и ее экономное расходование, особенно в низкотемпературных условиях, является «узким местом» в реализации тактико-технических возможностей МР. И именно его мыслится «расшить» предлагаемыми конструктивно-техническими решениями для выполнения большего объема оперативных задач.
[78]Технологии производства работ с применением модулей водопенного, порошкового пожаротушения и установкой пожаротушения тонкораспыленной водой детально изложены в Руководстве по эксплуатации [см. Комплекс мобильный робототехнический. Руководство по эксплуатации. НТ598.00.00.000 РЭ. Утвержден НТ598.00.00.000РЭ-ЛУ. - М.: ВНИИПО МЧС России, - 85 с.].
[79]По завершению АСР работы по дезактивации и дегазации MP собственно должны выполняться личным составом в специальных костюмах [см. Правила по охране труда в подразделениях пожарной охраны. Приказ Министерства труда и социальной защиты Российской Федерации от 11.12. 2020 г. №881 н] и в соответствии с технической документацией завода-изготовителя [см. Комплекс мобильный робототехнический. Руководство по эксплуатации. НТ598.00.00.000 РЭ. Утвержден НТ598.00.00.000РЭ-ЛУ. - М.: ВНИИПО МЧС России, - 85 с.].
[80]После чего демонтируются обзорные телеустановки на манипуляторе и с применением технологического пульта управления по аппарели (фиг.4, вид б) производится размещение МРК-РП на штатном месте автомобиля «АБР-РОБОТ», а также его фиксация посредством талрепов, съемных растяжек и рым-болтов (фиг.4, вид а).
[81]Вообще же замыслы, тактические решения и особенности проведения АСР в зонах радиоактивного заражения, в очагах химического заражения и т.п. осуществляются в соответствии с положениями [см. Методические рекомендации по действиям подразделений федеральной противопожарной службы при тушении пожаров и проведении аварийно-спасательных работ. В соответствии с указанием Статс-секретаря-заместителя Министра Российской Федерации по делам гражданской обороны, чрезвычайным ситуациям и ликвидации последствий стихийных бедствий В.А. Пучкова от 26.05.2010 г. №43-2007-2007-18. - Екатеринбург, ООО «Издательство «Калан»», 2010 - 112 с.] и других служебных и отраслевых документов, планом тушения пожара (ПТП), который разрабатывается руководителем пожарно-спасательного подразделения совместно с администрацией производства.
[82]Сравнение заявляемого конструктивно-технического решения с прототипом показывает, что оно отличается следующими техническими признаками:
[83]как обеспечивающее безопасные условия и охрану труда личного состава пожарных-спасателей при проведении АСР, поскольку отсутствует какая-либо необходимость в их непосредственном участии в процессе;
[84]компактными габаритными размерами контейнера в боевом положении MP;
[85]простотой конструкции, в изготовлении и эксплуатации. Следовательно, можно предположить, что заявляемое техническое решение соответствует критерию «новизна».
[86]Полезная модель может быть изготовлена на стандартном оборудовании с использованием известных технологических процессов и оснастки, поэтому она соответствует критерию «промышленная применимость».
[87]Данное техническое решение экономично, обеспечивает более продолжительное время работы MP в зоне радиоактивного и/или химического заражения, что позволяет выполнить больший объем задач.
[88]Таким образом, технический результат, достигаемый полезной моделью, состоит в повышении функциональных возможностей и эффективности применения мобильного робота при разведке и дезактивации путем сборки химически токсичных изделий и последующего их транспортирования.
[89]Предлагаемый контейнер для дооборудования «Мобильного робота…» в натуральную величину был изготовлен в металле и апробирован в 2022 году в СПСЧ №1 ФГКУ «Специальное управление ФПС №5 МЧС России».
[90]Легкомонтируемый контейнер «Мобильного робота…» весьма прост по конструкции, в изготовлении и эксплуатации и может найти применение в практике пожарно-спасательных подразделений Специальных управлений ФПС МЧС России.
[91]Все это в целом повышает эффективность эксплуатации мобильных робототехнических комплексов разведки и пожаротушения легкого класса в процессе проведения АСР на аварийных объектах при условии их доукомплектования контейнером предлагаемой конструкции.



{kind=link}
{kind=link}
{kind=link}
{kind=link}