[1]Полезная модель относится к сельскому хозяйству и предназначена для использования преимущественно на фермах с крупным рогатым скотом, для приготовления и раздачи кормовой смеси животным.
[2]Известен робот-кормораздатчик Lely Vector, выпускаемый фирмой Lely Industries N.V. (www.lely.com), включающий бункер с измельчающим шнеком, перемещающейся колесной платформы, выгрузного окна с раздающим шнеком и вращающейся юбки для пододвигания корма.
[3]Недостатком данного устройства является отсутствие защиты кормовой смеси от осадков, отсутствие контроля качества приготовления кормовой смеси, износ бункера и шнека в результате смешивания и раздачи, низкое качество смешивания и малая точность раздачи сыпучих кормов, в связи с тем, что перемешивание и раздача осуществляется шнеком, конструкция которого не предусматривает работу с сыпучими кормами и комбикормом.
[4]Технической задачей полезной модели является защита кормовой смеси от осадков, повышение качества смешивания, увеличение точности раздачи сыпучих кормов и увеличение срока службы конструкции кормораздатчика.
[5]Техническим результатом полезной модели является автоматическая раздача качественной кормовой смеси крупному рогатому скоту.
[6]Вышеуказанный технический результат достигается тем, что в
роботе-кормораздатчике, состоящим из мобильной платформы в виде стального корпуса с колесной ходовой частью с электродвигателями, шнека и бункера под которым установлена система тензодатчиков, источника питания в виде блока аккумуляторов, блока управления с управляющим контроллером согласно полезной модели, бункер кормораздатчика оснащен виброприводами, имеет автоматически раздвигающуюся крышу, которая состоит из двух частей, внутри которой установлена система технического зрения в виде видеосенсора с программным обеспечением для определения качества кормовой смеси и источника света, а выгрузное окно имеет видеосенсор, контролирующий равномерность раздачи кормовой смеси.
[7]Сущность предлагаемого изобретения проясняется чертежами.
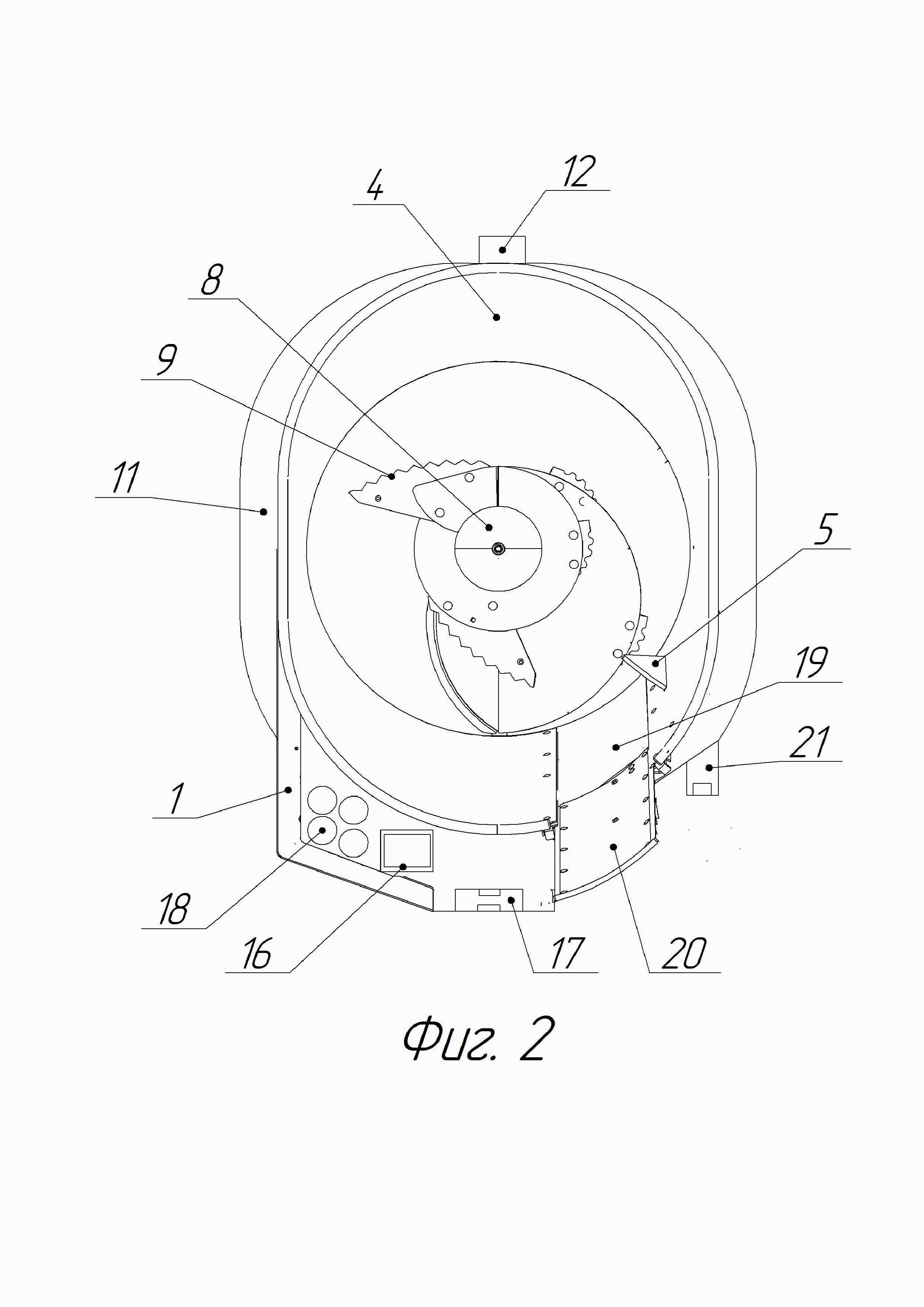
[8]На фиг. 1 представлена схема робота-кормораздатчика спереди с закрытой крышей; на фиг. 2 представлена схема робота-кормораздатчика сверху с открытой крышей.
[9]Робот-кормораздатчик содержит мобильную платформу 1 выполненную из пластикового корпуса и стального каркаса, снизу которого размещены движители 2 в виде грузоподъемных колес с электроприводами 3. По центру мобильной платформы 1 расположен стальной бункер 4 имеющий форму усеченного конуса, а внутренние стенки бункера 4 имеют спиральные ребра и оснащены противорезами 5. Под дном бункера 4 расположена система тензодатчиков 6. На наружных стенках бункера 4 и под ним устанавливаются цилиндрические виброприводы 7. Внутри бункера 4 установлен режущий шнек 8 в виде конической спирали, оснащенный ножами 9. В нижней части бункера расположен мотор-редуктор 10, приводящий шнека 8 в движение. Верхняя часть бункера 4 оснащена раздвижной крышей 11 из высокопрочного пластика. Крыша 11 состоит из двух частей, приводимых в движение линейным электроприводом 12. На внутренней части крыши 11 установлен видеосенсор 13 в виде камеры и источника света 14. На наружной стороны крыши установлен датчик лидар 15. Внутри пластикового корпуса мобильной платформы 1 расположен блок управления 16, GPS маяк 17 и источник питания 18 и разъем для зарядки аккумуляторов на зарядной станции. Бункер 4 имеет выгрузное окно 19 и выдвижную заслонку 20, которая регулирует выдачу кормовой смеси. Около выгрузного окна 19 установлена камера 21, следящая за равномерностью раздачи. Снизу мобильной платформы 1 находится индуктивный датчик 22.
[10]Робот-кормораздатчик работает следующим образом.
[11]В начале работы в блок управления 16 автоматически загружаются данные с маршрутом до животноводческих помещений, данные с рационом и режимом питания определенных групп крупного рогатого скота, которые содержатся в общей базе рационов фермы. Процесс начинается с загрузки кормов (силос, сенаж, стебельчатые корма, сыпучие корма, комбикорм, концентраты и минералы) и лекарственных добавок, на кормовой кухне, в бункер 4 робота-кормораздатчика.
[12]Система тензодатчиков 6, установленных под дном бункера 4, осуществляет контроль за процессом загрузки кормов. Тензодатчики 6 передают сигнал в блок управления 16, в котором определяется масса загруженного корма в бункер 4.
[13]Мотор-редуктор 10, расположенный в нижней части бункера 4, передает крутящий момент шнеку 8. Шнек 8 измельчает загруженную кормовую массу ножами 9, установленными по всей длине конической спирали. Для улучшения измельчения кормовой смеси, а также предотвращения проворачивания и наматывания длинноволокнистых кормов на шнек 8 на внутренней стороне бункера 4 установлены противорезы 5, которые выдвигаются за счет линейных приводов, установленных снаружи бункера 4. Кормовая масса приподнимается шнеком 8 вверх, а затем свободно сползает вниз по коническим стенкам бункера 4. Бункер 4 перемешивает кормовую смесь, используя виброприводы 7, установленные снаружи бункера 4 и под ним. Вибрационное воздействие на бункер 4 и рабочие органы кормораздатчика значительно увеличивает производительность процесса приготовления, снижает энергоемкость и улучшает качество смеси. Спиральные ребра бункера 4 служат как направляющие кормовой смеси, кормовая масса приподнимается вверх, а затем свободно сползает вниз по коническим стенкам бункера 4. В результате выполнения этой технологической операции происходит быстрое перемешивание кормовых составляющих, а также сыпучих кормов и получается рыхлая однородная кормовая смесь.
[14]Одновременно с процессом перемешивания кормовой смеси робот-кормораздатчик начинает движение по ферме. Движение кормораздатчика осуществляется за счет приводов 3, установленных на его движителях 2 в виде колес.
[15]Перед началом движения линейный электропривод 12 закрывает пластиковую крышу 11, состоящую из двух частей. Крыша 11 защищает кормовую смесь от осадков, которые влияют на качество смеси. Повышенное содержание влаги, в результате осадков, в кормовой смеси также влияет на процесс смешивания, так как повышается нагрузка на мотор-редуктор 10, а шнек 8 быстрее изнашивается. Робот-кормораздатчик ориентируется по ферме, используя GPS маяк 17. Для избегания столкновения с препятствиями на крыше 11, сверху, установлен датчик лидар 15. Лидар 15 позволяет определить препятствие в конической области в радиусе 5 метров. Система технического зрения из видеосенсора 13 и источника света 14, расположенных на внутренней части крыше 11, осуществляет контроль за качеством приготовленной смеси. Для получения снимков видеосенсором 13, во время процесса смешивания мотор-редуктор 10 останавливает шнек 8. Система технического зрения, используя сверточную нейронную сеть, обрабатывает эти данные и получает информацию о качестве приготовленной смеси. Исходя из полученных данных, регулируется скорость шнека 8 и уровень вибрации бункера 4.
[16]Добравшись до точки назначения, робот-кормораздатчик, используя индуктивный датчик 22, получает информацию о своем местоположении и начале кормового стола. Перед началом раздачи кормораздатчик проверяет качество кормовой смеси в бункере 4 и начинает раздачу только после завершения процесса приготовления. Раздача кормовой смеси осуществляется с помощью вибраций бункера 4 и шнека 8, которые направляет кормовую массу в сторону выгрузного окна 19. Дозирование кормовой смеси регулируется за счет шиберной заслонки 20, скорости вращения шнека 8, уровня вибраций бункера 4 и скорости движения кормораздатчика. Для регулирования этих параметров в блок управления 16 поступает полученная от тензодатчиков 6 информация о количестве выданной смеси. Камера 21, расположенная около выгрузного окна 19 следит за равномерностью раздачи кормовой смеси. После раздачи кормовой смеси робот-кормораздатчик возвращается на кормовую кухню, где находится зарядная станция и происходит зарядка источника питания 18.
[17]Использование полезной модели позволит осуществлять автоматическую раздачу качественной кормовой смеси крупному рогатому скоту и повысит срок службы кормораздатчика.



{kind=link}
{kind=link}