[1]Полезная модель относится к конструкции беспилотных летательных аппаратов (БПЛА), к размещению и креплению силовых установок, различного оборудования на БПЛА.
[2]Известна конструкция беспилотного летального аппарата вертикального взлета и посадки, представляющего собой грузовой коптер, состоящий из управляющего модуля, модуля фюзеляжа и модулей основных силовых установок, при этом количество модулей основных силовых установок варьируется в зависимости от массы транспортируемого груза [Патент № RU 2017109937, дата приоритета 27.03.2017 г., дата публикации 28.05.2018 г.]
[3]Известна конструкция БПЛА вертикального взлета и посадки, представляющего собой фюзеляж с неподвижными передним и задним крыльями обратной стреловидности, размещенными на фюзеляже со смещением заднего крыла по высоте вверх и назад относительно переднего крыла, с углом установки заднего крыла по тангажу больше переднего крыла. [Патент № RU 2017143420 A, дата приоритета 12.12.2017 г., дата публикации 11.03.2020 г., а также числится как патент № RU 2716391 C2, дата приоритета 12.12.2017 г., дата публикации 11.03.2020 г.]
[4]В качестве прототипа для полезной модели выбран БПЛА вертикального взлета и посадки, содержащий фюзеляж полумонококового типа с одной хвостовой балкой и хвостовым оперением, колонку с двумя соосными несущими винтами, силовую установку, посадочное шасси, бортовой комплекс управления, отличающийся тем, что двигатель силовой установки располагается перед колонкой, а оборудование бортового комплекса управления для минимальной полезной нагрузки устанавливается преимущественно на конце хвостовой балки с возможностью его соответствующей центровочной переустановки вперед при оснащении полезной нагрузкой от минимальной до максимальной. Устройство отличается тем, что оборудование бортового комплекса управления и целевая нагрузка монтируются на отдельных рамах и фиксируются в фюзеляже анкерными гайками стрингерных и шпангоутных усилений несущей обшивки. Также, что фюзеляж включает отсеки: передний, центральный и хвостовой балки, а его несущая обшивка для доступа внутрь фюзеляжа содержит усиленные по краям проемы с быстросъемными крышками и по обводам переднего отсека имеет минимальный зазор с силовой установкой. [Патент № RU 2015147268/11, дата приоритета 03.11.2015 г., дата публикации 10.03.2016 г.]
[5]В данных конструкциях имеются следующие ограничения:
[6]1. Невозможно работать при низких температурах (от -10°С и ниже);
[7]2. Низкая емкость аккумуляторов, работа до 45 мин;
[8]3. Относительно невысокая защищенность каналов связи;
[9]4. Ограниченная сфера использования;
[10]5. Ограниченная дальность полета.
[11]Задачей (техническим результатом) предлагаемой полезной модели является обеспечение возможности применения для вертикального взлета и посадки, зависания и маневрирования на нулевых скоростях с обеспечением дальности и продолжительности полета.
[12]Технический результат достигается тем, что:
[13]1. Беспилотный летательный аппарат вертикального взлета и посадки (БПЛА ВВП), оснащенный маршевым винтом, системой связи, корпусом с крыльями, четырьмя независимыми несущими винтами, отличающийся тем, что выполнен по аэродинамической схеме «летающее крыло», несущие винты закреплены на крыльях параллельно друг другу, снабжен топливно-электрической системой питания, крылья имеют винглеты, направленные наверх.
[14]2. БПЛА ВВП по п. 1 отличающийся тем, что корпус с крыльями изготовлен из пенополиафилена ЕРО и покрыт нанокраской.
[15]3. БПЛА ВВП по п. 1 отличающийся тем, что снабжен установкой гибридной топливно-электрической системой питания, которая включает в себя ДВС и электродвигатели.
[16]4. БПЛА ВВП по п. 1 отличающийся тем, что на корпусе с крыльями размещен прибор для видеосъемки или геодезической съемки местности, который расположен вблизи центра масс БПЛА.
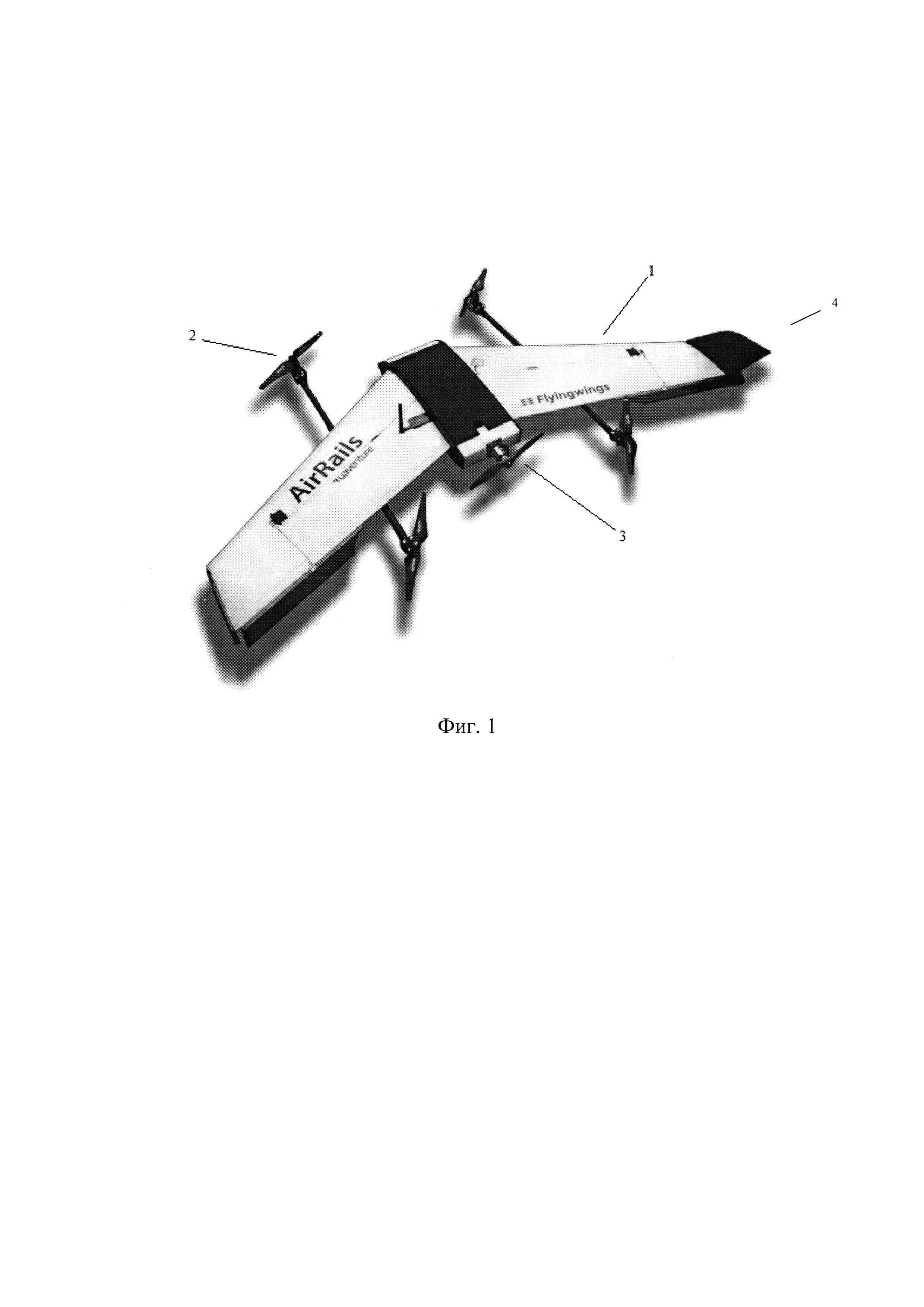
[17]Сущность заявляемой полезной модели поясняется фигурами:
[18]Фиг. 1 - Схема БПЛА ВВП «ИнфраСкан» с 4 независимыми винтами и винглетами.
[19]Фиг. 2 - Схема работы гибридной силовой установки.
[20]На фиг. 1 обозначено:
[21]1. Корпус, изготовленный из пенополиафилена и покрытый нанокраской.
[22]2. Независимые винты для подъема и парения в воздухе.
[23]3. Основной маршевый винт.
[24]4. Винглеты, направленные наверх.
[26]В результате анализа используемых БПЛА в ОАО «РЖД» и в целях усовершенствования системы видеоконтроля предлагается изменить конструкцию беспилотного летательного аппарата на летающее крыло с вертикальным взлетом и посадкой. Авторами разработан проект БПЛА ВВП и получил название «ИнфраСкан», который можно применять для зависания и маневрирования на нулевых скоростях с обеспечением дальности и продолжительности полета (фиг. 1). Для полета предлагается использование основного маршевого винта и 4 независимых винта (для подъема).
[27]Для проекта предусмотрен тип силовой установки: электродвигатель AT-Plettenberg Nova 15/40 WK с контроллером MST 80-240 (1 или 4 шт.) или электродвигатели АТВ (НПО «Андроидная техника», Россия), для винта; ДВС с генератором для питания электросистемы или гибридная установка ДВС и электродвигатели (фигура 2), аккумуляторы литий-полимерные 5000 mAh 4S 30С (от 2 шт.).
[28]Подобраны отечественные компоненты и программное обеспечение, которые позволят перейти на импортозамещение: видеокамера SWIRT (выпускает РосТех), ПО - Геоскан (Россия); материал БПЛА ВВП - пенополиофилен ЕРО (Россия), нанокраска - порошковая краска с добавлением нановолокон оксида алюминия (г. Красноярск) - для увеличения теплопроводности и влагозащищенности.
[29]Управление БПЛА ВВП «ИнфраСкан» - полуавтоматическое, через наземную станцию (планшет с протоколом связи SPI); дополнительное навесное оборудование для съемки - геодезический, лазерный сканеры. Кроме того, БПЛА ВВП оснащается следующими компонентами: гироскоп MPU6000 8 KHz, акселерометр полетного контроллера (определяют положение БПЛА и стабилизируют в воздухе); полетный контроллер - DJI NAZA М V2$; процессор полетного контроллера - F7 - 216 MHz, размер платы 30,5*30,5 мм; встроенный видеопередатчик; барометр и компас; сонар для предотвращения столкновения с препятствиями; освещение - светодиоды (красный и синий), вентилятор для охлаждения двигателя; для второго проекта - автомат перекоса, как на вертолете; гибридные элероны - для поперечного управления - момент крена с рулем высоты. Элероны - небольшие закрылки, которые будут располагаться на задней кромке каждого крыла и сконфигурированные так, что, когда один поднимается, другой опускается. Элерон вверх уменьшает подъемную силу и создает направленную вниз силу на крыле. Опускающийся элерон увеличивает подъемную силу и создает восходящую силу на крыле. Винглеты направлены наверх, как показано на фигуре 1. Работая вместе, они заставляют БПЛА ВВП перемещаться вверх. Контролируется одним из каналов приемника радиоуправления.
[30]Вес БПЛА ВВП с установленным оборудованием - не более 9 кг.
[31]Использование беспилотного летательного аппарата вертикального взлета и посадки для видеоконтроля активов ОАО «РЖД»
[32]Одна из сфер применения БПЛА ВВП в холдинге - это системы видеоконтроля с помощью БПЛА, которые применяются для мониторинга состояния объектов инфраструктуры, в том числе пути и искусственных сооружений, выполнения ремонтных работ; оценки состояния объектов электроэнергетической инфраструктуры, контроля охранных зон линий электропередачи; поиска утечек в тепловодоснабжении и несанкционированных подключений к инфраструктуре; учета недвижимости и земельных участков, выявления незаконно возведенных, снесенных или используемых не по назначению строений, а также для сверки кадастровых границ земельных участков с фактическими границами; мониторинга опасных экзогенных геологических и гидрологических процессов (оползни, подмывы берегов рек), геологических проявлений в районе распространения многолетнемерзлых пород, прогноза лавиноопасности, оценки динамики климатических изменений; топографо-геодезической съемки. Список задач, для которых могут использоваться БПЛА ВВП в ОАО «РЖД», постоянно расширяется.
[33]Источники информации:
[34]1. Патент № RU 2017109937, дата приоритета 27.03.2017 г., дата публикации 28.05.2018 г. Российской Федерации. МПК В64С 29/00 (2006.01), В64С 27/22 В64С 39/02.
[35]Модульный беспилотный летательный аппарат вертикального взлета и посадки.
[36]Автор: Гайдаренко Александр Михайлович; патентообладатель: Гайдаренко Александр Михайлович.
[37]2. Патент № RU 2015147268/11, дата приоритета 03.11.2015 г., дата публикации 10.03.2016 г. Российской Федерации. МПК В64С 27/10, В64С 39/02. Беспилотный летательный аппарат вертикального взлета и посадки. Авторы: Дышаленков Артур Анатольевич, Иванников Константин Валерьевич, Медведев Владимир Михайлович, Сигаев Виктор Алексеевич, Созинов Павел Алексеевич, Шибанов Юрий Викторович; патентообладатель: Акционерное общество "Государственный научно-исследовательский институт приборостроения", АО "ГосНИИП".
[38]3. Патент № RU 2017143420, дата приоритета 12.12.2017 г., дата публикации 11.03.2020 г. Российской Федерации. МПК В64С 27/08, В64С 27/22. Беспилотный летательный аппарат вертикального взлета и посадки. Авторы: Каневский Михаил Игоревич, Зубарев Александр Николаевич, Бояров Максим Евгеньевич, Кораблев Юрий Николаевич; патентообладатель: Министерство промышленности и торговли России.



{kind=link}
{kind=link}