[1]Полезная модель относится к области подводной техники, а именно к автономным необитаемым подводным аппаратам, и может быть использована в различных подводных исследованиях, в частности для мониторинга подводных объектов при движении подо льдом.
[2]Известен безвинтовой надводный робот (RU153711, МПК B62D 57/04, опубл. 27.07.2015), содержащий движитель, выполненный в виде двух вращающихся в противоположные стороны с постоянной разностью фаз эксцентриков, расположенных внутри корпуса робота и приводящихся в движение электродвигателем посредством зубчатых колес. Корпус робота выполнен в виде полого эллиптического цилиндра с килем, расположенным вдоль главной диагонали корпуса и обеспечивающим устойчивость робота и стабильную передачу силы сопротивления внешней среде в поперечном направлении (см. патент на полезную модель №153711 от 27.07.2015).
[3]Недостатками данного устройства являются ограниченные возможности его движителя для осуществления управляемого перемещения, а также отсутствие в его конструкции узлов регулировки плавучести.
[4]Известен безвинтовой подводный робот, содержащий корпус, выполненный в виде эллипсоида, состоящего из двух половин, герметично соединенных друг с другом в экваториальной плоскости с помощью дискообразной опорной перегородки, отличающийся тем, что опорная перегородка содержит четыре прямоугольных окна, выполненных под углом 90° относительно друг друга; в упомянутой перегородке установлен узел маховиков, включающий в себя два больших маховика, установленных на главной оси, расположенной вдоль корпуса, симметрично и на некотором расстоянии относительно упомянутой перегородки, а также четыре малых маховика, размещенных в окнах опорной перегородки перпендикулярно главной оси, соединенных кинематически попарно с помощью дополнительных осей и зубчатых пар, при этом каждая пара малых маховиков выполнена с возможностью синхронного вращения; дополнительно робот снабжен двумя однотипными модулями плавучести, закрепленными в вершинах каждой из половин корпуса (см. патент на полезную модель №172254 от 03.07.2017).
[5]Недостатками данного робота является то, что он имеет довольно сложную конструкцию, сложность маневрирования робота при движении в стесненных условиях (движение подо льдом), а также трудность фиксации в неподвижном положении при наличии возмущающих воздействий (например, течений).
[6]Задача полезной модели: повышение маневренности и эффективности движения робота за счет управляемого контакта с внутренней поверхностью льда при подледном перемещении.
[7]Поставленная задача решается тем, что робот для подледного перемещения состоит из функционально соединенных между собой приводного модуля и модуля управления плавучестью, включающего электропневматическую систему, приводной модуль включает в себя привод, установленный на платформе и кинематически связанный с колесами, оснащенными грунтозацепами, при этом модуль управления плавучестью содержит систему управления электрически связанную с баллонами, установленными внутри колес, а электропневматическая система включает в себя систему обратных клапанов и управляемый пневмораспределитель, резервуар со сжатым воздухом, соединенных нагнетательными линиями с баллонами.
[8]Совокупность заявляемых признаков обеспечивает достижение задачи полезной модели - повышение маневренности и эффективности движения робота за счет управляемого контакта с внутренней поверхностью льда при подледном перемещении.
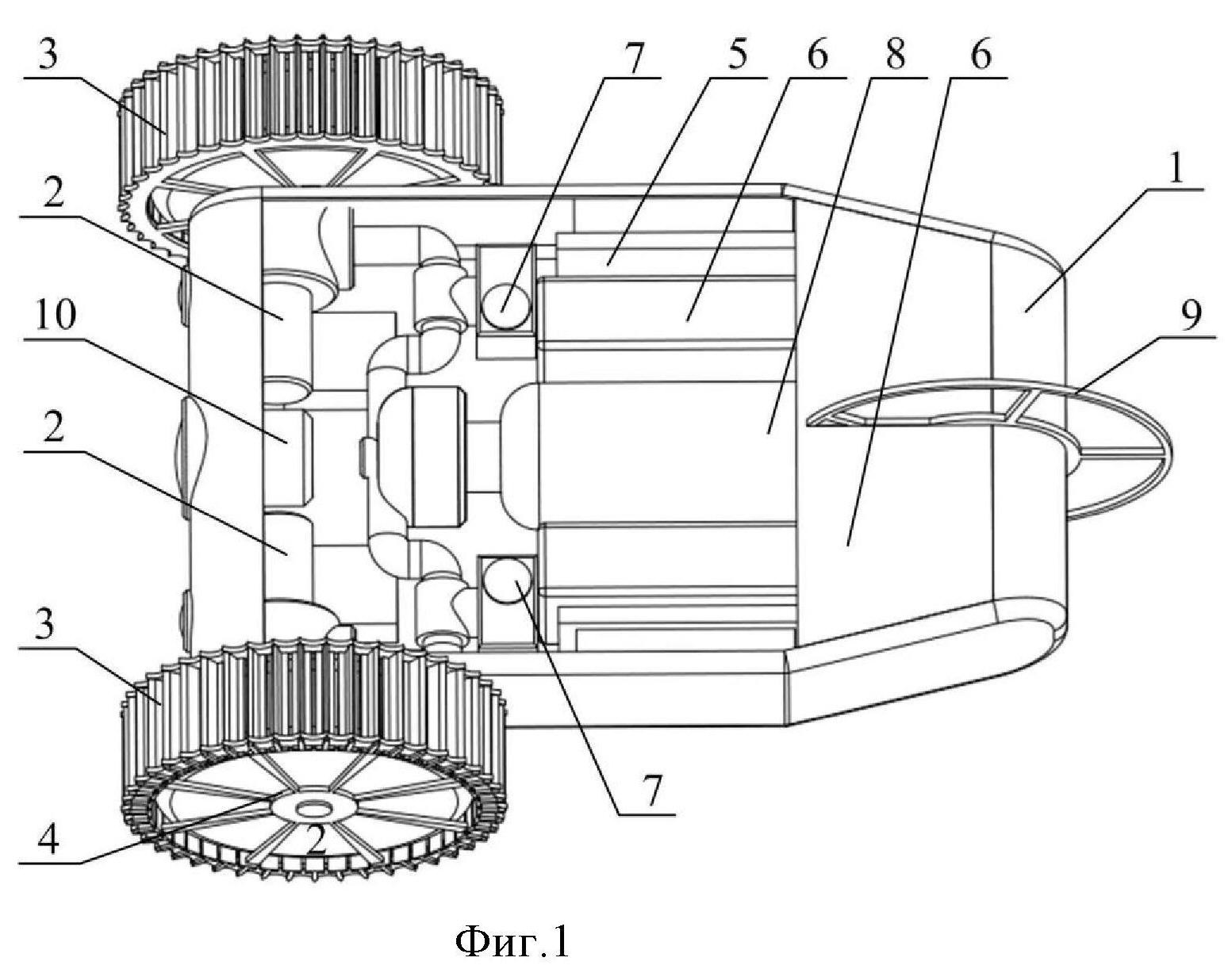
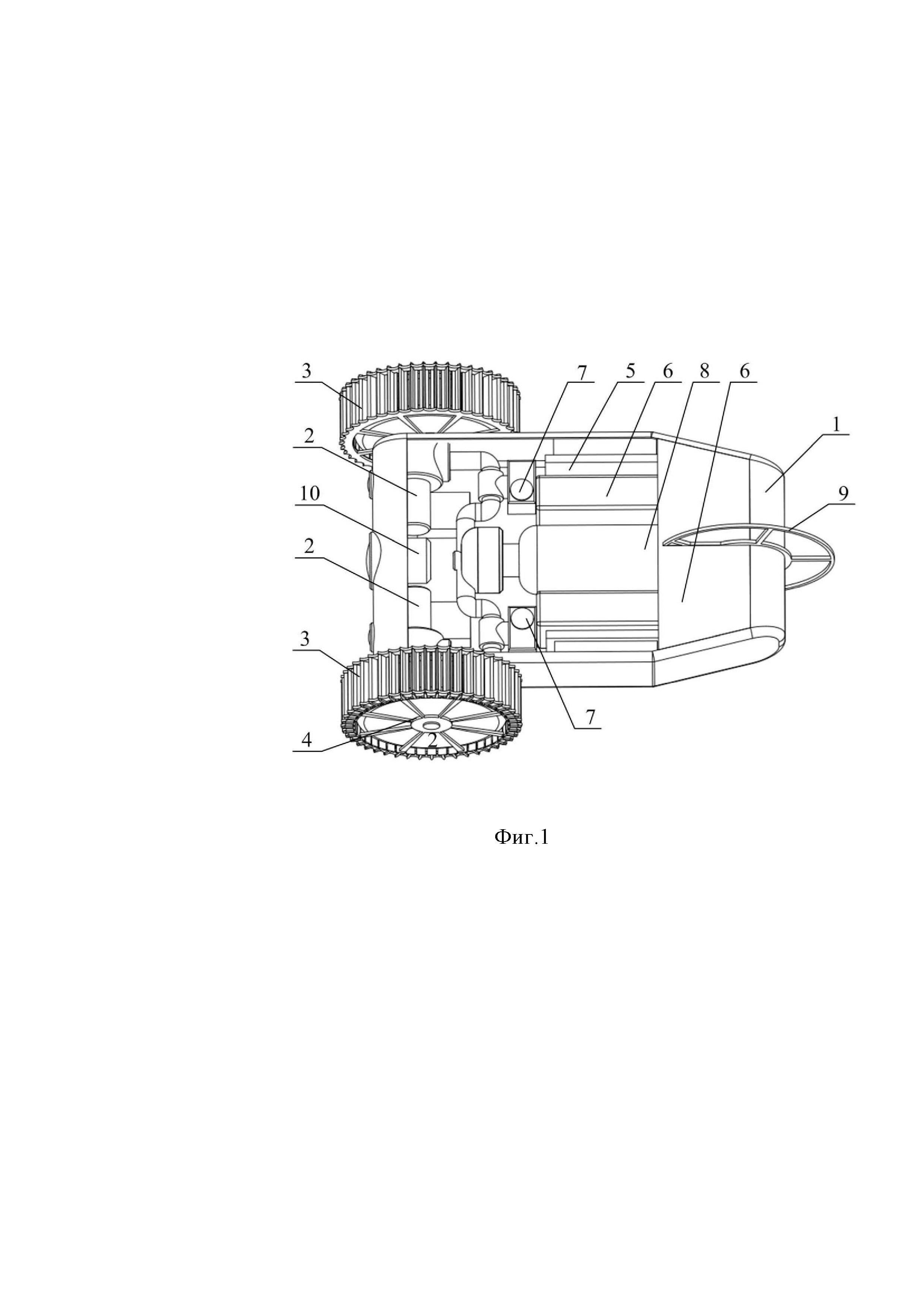
[9]На фиг. 1 показан общий вид робота.
[10]Робот включает в себя платформу 1, на которой установлены приводы 2, кинематически связанные с колесами 3, содержащими грунтозацепы. Внутри колес 3 установлены колесные баллоны 4 с изменяемым объемом и заполняемые воздухом. На платформе 1 установлена система управления 5. В свою очередь приводы 2 и система управления 5 электрически связаны с аккумуляторной батареей 6, установленной на платформе 1. Электропневматическая система включает в себя систему обратных клапанов (на фиг. 1 не показаны), пневмораспределители 7 и резервуар 8 со сжатым воздухом, которые соединены нагнетательными линиями с баллонами 4. Кроме этого, робот имеет заднее пассивное колесо 9, подвижно установленное на корпусе 1. На корпусе 1 установлено навесное диагностическое оборудование 10.
[11]Движение робота происходит следующим образом. В начальный момент времени баллоны 4 спущены, робот при этом имеет слабо положительную плавучесть, что позволяет оператору без труда запустить его под лед через прорубь. После этого, включается электропневматическая система и в колесные баллоны 4 закачивается воздух из резервуара 8. Баллоны 4 под давлением воздуха увеличивают свой объем и заполняют собой внутреннюю поверхность колес 3. При этом увеличивается плавучесть робота, а колеса 4 прижимаются ко внутренней поверхности льда. Для движения робота по желаемой траектории осуществляется задание законов изменения скоростей вращения ведущих колес 3, при этом фактическая линейная скорость робота определяется пересчетом угловой скорости пассивного заднего колеса 9. Для недопущения возможности проскальзывания ведущих колес 3, система управления 5 обеспечивает реализацию плавного нарастания управляющих сигналов питания приводов 2, формирующих движущие моменты на ведущих колесах, не превышающих предельных сил сцепления колес с опорными поверхностями. Тем самым достигается повышение эффективности энергопотребления робота при его старте и в целом всего процесса движения за счет отсутствия проскальзывания колес. Результаты предварительных численных экспериментов на математической модели устройства доказали эффективность предлагаемого технического решения. При этом КПД механического преобразователя движителя приводов колес составил около 94%, а общая энергоэффективность, выражаемая отношением механической энергии к затрачиваемой электрической, повысилась с 19 до 26% при сохранении динамики разгона робота.
[12]Заявляемое техническое решение отличается от прототипа тем, что, робот для подледного перемещения состоит из функционально соединенных между собой приводного модуля и модуля управления плавучестью, включающего электропневматическую систему, причем приводной модуль включает в себя привод, установленный на платформе и кинематически связанный с колесами, оснащенными грунтозацепами, при этом модуль управления плавучестью содержит систему управления, электрически связанную с баллонами, установленными внутри колес, а электропневматическая система включает в себя систему обратных клапанов и управляемый пневмораспределитель, резервуар со сжатым воздухом, соединенных нагнетательными линиями с баллонами.
[13]Отличительные признаки заявляемого технического решения не выявлены при изучении данной и смежных областей техники.
[14]Использование предлагаемого устройства позволит улучшить эксплуатационные характеристики за счет повышения маневренности устройства, а также получить возможность проведения дистанционного управления устройством.


{kind=link}