[1] Изобретение относится к подъемно-транспортному оборудованию, конкретно к механизации погрузочно-разгрузочных работ на лесозаготовках.
[2]
Известен стреловой
подъемный механизм, содержащий самоходное шасси с поворотной колонной, стрелу с захватным устройством и силовой цилиндр (а.с. СССР 1684245, кл. В 66 С 23/68, публ. 1991 г.). Данное
устройство
предназначено для самопогрузки ящиков с плодоовощной продукцией на буксируемый прицеп.
[3] Известен кран-манипулятор, содержащий колонну, несущую шарнирно-сочлененную стрелу с
захватом,
гидроцилиндры и блоки с запасованными тросами, концы которых закреплены на штоках гидроцилиндров (а.с. СССР 502832, кл.В 66 С 23/06, публ. 15.02.76). Указанное устройство, предназначенное
для
обслуживания заводских станков, непригодно для применения на лесозаготовках.
[4] Наиболее близким по назначению и технической сути к предлагаемому изобретению является предназначенный
для
погрузки бревен гидравлический кран-манипулятор, содержащий самоходное шасси с поворотной колонной, на которой установлены шарнирно-сочлененная стрела и привод в виде силовых цилиндров, штоки
которых
соединены с рычагами, связанными с телескопической секцией на конце стрелы (а. с. СССР 544606, кл. В 66 С 23/04, публ. 30.01.77 - прототип).
[5] К недостаткам прототипа следует
отнести то,
что его конструкция, в которой уменьшение вылета стрелы с грузом происходит за счет втягивания телескопической секции, не обеспечивает прямолинейно-поступательного перемещения груза в
процессе
погрузки бревен на лесовоз. При движении груза по криволинейной траектории возникают значительные изгибающие нагрузки на стрелу и ее опорную колонну, которые могут привести к аварии и
разрушению
крана.
[6] Технической задачей является повышение безопасности путем обеспечения прямолинейного перемещения груза при изменении вылета стрелы крана.
[7] Технический
результат
достигается тем, что в смонтированном на самоходном шасси гидравлическом кране-манипуляторе, содержащем оборудованную гидроцилиндром опорно-поворотную колонну, на которой установлена
шарнирно-сочлененная стрела, имеющая корневую секцию и снабженную захватным органом телескопическую секцию, связанную со штоком закрепленного на корневой секции второго гидроцилиндра, при этом кран
имеет гибкий элемент, запасованный в блок, установленный на оси, соединяющей корневую секцию с опорно-поворотной колонной, связанный с корневой секцией конец телескопической секций имеет наплыв с
цилиндрической поверхностью, охватываемой гибким элементом, у которого один конец связан со штоком первого гидроцилиндра, а другой конец закреплен на телескопической секции, причем радиус
цилиндрической поверхности относится к радиусу блока как 1/2.
[8] Достигаемый технический результат состоит в том, что при отношении радиуса цилиндрической поверхности к радиусу блока как
1/2 захватный орган крана перемещается по прямой линии при любом изменении вылета стрелы. При этом изгибающие динамические нагрузки на стрелу сведены к минимуму (действуют только в начале движения
груза и при останове, т.е. при минимальных скоростях).
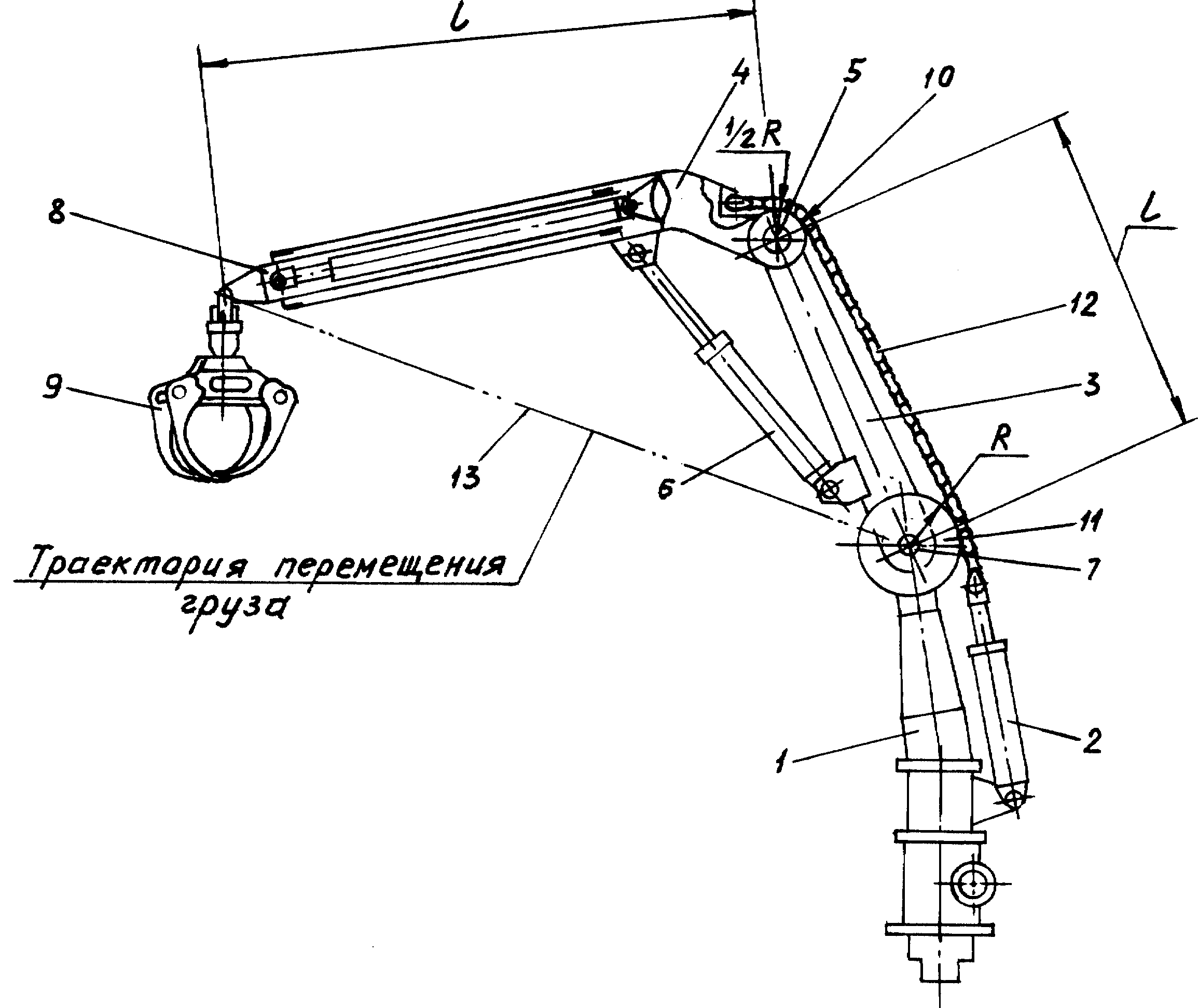
[9] Конструкция конкретного устройства крана-манипулятора поясняется чертежом, на котором показан общий вид крана.
[10]
Гидравлический кран-манипулятор содержит опорно-поворотную колонну 1, на которой закреплен гидроцилиндр 2. Грузовая стрела крана состоит из корневой секции 3 и телескопической секции 4, которые
связаны между собой шарниром 5 и гидроцилиндром 6. Секция 3 закреплена на колонне 1 при помощи шарнира 7. Секция 4 содержит подвижную часть 8, на конце которой имеется грузозахватное устройство 9. На
неподвижной части 4 выполнен наплыв, имеющий цилиндрическую поверхность 10, ось которой совпадает с осью шарнира 5.
[11] Блочная система содержит блок 11, установленный соосно с шарниром 7,
и гибкий элемент в виде цепи 12. Нижний конец цепи 12 связан со штоком гидроцилиндра 2, верхний конец закреплен на секции 4, причем цепь охватывает цилиндрическую поверхность 10. Радиус
цилиндрической
поверхности 10 относится к радиусу блока 11 как 1/2.
[12] На кране работают в следующем порядке. Манипулятор с колонной 1 поворачивают в сторону груза с помощью поворотного
устройства на
шасси (условно не показано). Для манипулирования грузозахватным устройством 9 подают рабочую жидкость под давлением в поршневую полость гидроцилиндра 6, при этом шток гидроцилиндра
выдвигается и
поворачивает телескопическую секцию 4 относительно корневой секции 3, увеличивая вылет грузовой стрелы. Как показывают расчеты, если радиус цилиндрической поверхности 10 относится к
радиусу блока 11
как 1/2, а длина секции 3 равна длине секции 4 (например, при полностью втянутой подвижной части 8, как показано на чертеже), то узел подвеса устройства 9 перемешается по прямой
линии 13. При другом
соотношении длин секций 3 и 4, т. е. при выдвинутой вперед подвижной части 8, грузозахватное устройство 9 перемещается параллельно линии 13 по траектории, близкой к прямой.
[13] При
достижении нужного вылета стрелы прекращают подачу жидкости в цилиндр 6, и устройство 9 зависает непосредственно над грузом, конкретно над пакетом бревен. Для опускания устройства 9
подают жидкость в
поршневую полость цилиндра 2. При этом шток цилиндра 2 выдвигается, а секции 3 и 4, связанные цилиндром 6, поворачиваются вокруг шарнира 7 (против часовой стрелки по чертежу) как
одно целое.
Устройство 9 опускается и захватывает груз.
[14] Для подъема груза подают жидкость в штоковую полость цилиндра 2. Шток втягивается, цепь 12 натягивается и через блок 11
поворачивает стрелу
(т.е. секции 3, 4) по часовой стрелке, при этом устройство 9 с грузом поднимается вверх. Для укладки груза на транспортную платформу подают жидкость в штоковую полость цилиндра 6.
Шток цилиндра 6
втягивается, секция 4 складывается относительно секции 3, вылет стрелы уменьшается, и устройство 9 с грузом перемещается по траектории 13. Таким образом, управляя подачей рабочей
жидкости в цилиндры 2,
6 обеспечивают перемещение груза по прямой траектории, совпадающей с линией 13 или параллельной ей.
[15] Предлагаемая конструкция крана-манипулятора имеет следующие
преимущества в
сравнении с известными аналогами:
- грузозахватное устройство перемещается по прямой линии во всем диапазоне изменения вылета стрелы;
- в связи со значительным
снижением изгибающих
нагрузок опорно-поворотная колонна и корневая часть имеет меньший вес;
- манипулятор с данной кинематической схемой значительно проще в управлении при выборе оптимальной
траектории
перемещения груза.
[16] В соответствии с описанной выше схемой на предприятии ОАО НПП "Старт" (г. Екатеринбург) изготовлен опытный образец гидравлического крана-манипулятора,
который
установлен на автомобиле-лесовозе. Проведены испытания крана, показавшие хороший результат.
[17] Изложенное выше позволяет сделать вывод, что данное техническое решение отвечает
критериям
новизны, неочевидности и промышленной применимости, в связи с чем предлагается к правовой защите патентом на изобретение.