[1]Полезная модель относится к области прикладного телевидения и может быть использована в системах телевизионной (ТВ) автоматики и автоматического регулирования, в следящих устройствах, различных системах технического зрения для определения дальности до объектов, их размеров, углового положения объектов в кадре на основе их ТВ изображений, выработки на основе углового отклонения объекта от заданного, управляющих сигналов для управления линией визирования электронной стабилизации ТВ изображений и т.д.
[2]Принципы определения параметров объектов на основе ТВ изображений нашли свое отражение в работах [1, 2]. Использование видеоинформации с ТВ камеры для вычисления параметров объектов может осуществляться в измерительной системе координат ТВ камеры Оху [3]. При этом, если х, у - измерительная система координат, центр которой О совмещен с центром рабочей поверхности матричного фотоприемника (МФП), то положение изображения центра объекта на МФП характеризуется координатами xi и yi.
[3]Если через центр МФП ТВ камеры проходит ось оптической системы, то координаты xi и yi, характеризуют угловое отклонение линии визирования объекта от оптической оси. Другими словами, текущие величины координат xi и yi характеризуют угол «рыскания» и угол «тангажа» объекта наблюдения (фиг. 1), а значения Δxi и Δyi расстояние от центра МФП до центра наблюдаемого объекта (объекта селекции).
[4]В работе [1] представлены ТВ устройства летательных аппаратов, где отражаются вопросы построения ТВ визиров или координаторов. В общем случае ТВ визир может измерять угловое отклонение объекта от оптической оси ТВ камеры в горизонтальной и вертикальной плоскостях и может осуществлять выработку сигналов управления по углу «рыскания» (влево-вправо) и углу «тангажа» (вверх-вниз) в измерительной систем координат ТВ камеры Оху.
[5]В ней также рассматриваются ТВ визиры с амплитудной, а также корреляционной обработкой видеосигналов применительно к обработке одноканальных черно-белых ТВ изображений, что является их недостатком. Это связано с тем, что необходимо использовать ТВ изображения с высокой контрастностью цели и фона. Недостаточный уровень освещенности объектов приводит к снижению уровня сигнала и контрастности ТВ изображения, что в конечном итоге влияет на точность определения координат и положения объекта в пространстве.
[6]Наиболее близким по совокупности операций и техническим признакам является устройство определения углового положения объектов заданного цвета, согласно патенту [4].
[7]Структурная схема устройства для определения углового положения объектов заданного цвета и представляет собой ТВ автомат, имеющий блоки и узлы, включающие спектрозональную ТВ камеру, m - аналого-цифровых преобразователей (АЦП) видеосигналов, формирующих на своих выходах цифровые сигналы в n-разрядном двоичном коде и представленные в параллельном виде, первая группа m-дешифраторов сигналов, вторая группа m-дешифраторов сигналов, коммутатор выбора сигнала объектов заданного цвета, сумматор сигналов, знакогенератор, видеоконтрольное устройство (ВКУ), блоки и панель управления, исполнительное устройство, вычислительное устройство с возможностью определения углового отклонения αi объектов заданного цвета по углу рыскания (αх) и углу тангажа (αу).
[8]Принцип работы устройства заключается в следующем. Спектрозональная ТВ камера, осуществляет регистрацию лучистого потока отраженного от объектов в m-зонах спектрального участка от λ1 до λn, при этом m≥3. После преобразования лучистого потока осуществляется формирование m-спектрозональных видеосигналов U1(t), …, Ui(t)…, Um(t), каждый из которых поступает на вход своего АЦП и тем самым образуя m-информационных каналов. На выходах АЦП формируются цифровые сигналы в n-разрядном двоичном коде, которые представлены в параллельном виде. Они поступают на входы первой группы дешифраторов 41, … 4i, …, 4m, каждый из которых может быть настроен на определенную кодовую последовательность импульсов, поступающих от АЦП с помощью блока установки амплитуды входных сигналов в каждом информационном канале.
[9]При совпадение кодовой последовательности импульсов на выходе первой группы дешифраторов, формируются сигналы логической единицы "1" или нуля "0" в случае не совпадения. Эти сигналы поступают на вторую группу дешифраторов, каждый из которых на своем выходе формирует сигнал логической единицы "1" в случае совпадения определенной кодовой последовательности сигналов на ее входах.
[10]Далее сигналы логической единицы с выходов второй группы дешифраторов поступают на входы блока выборки (коммутатора) сигналов объектов заданного цвета. Этот блок выбора цвета объекта дает разрешение на коммутацию одного сигнала с 1, 2, …, i, …, 2m входа коммутатора на его выход. С выхода коммутатора сигнал логической единицы заданного цвета (заданной спектральной характеристики) объекта поступает на вход вычислительного устройства.
[11]Оператор может наблюдать на экране цветного видеоконтрольного устройства (ВКУ) все объекты, а также выделенный объект заданного цвета и его отображаемые параметры, формируемые с помощью знакогенератора. С выхода спектрозональной ТВ камеры поступают синхронизирующие импульсы на вход местного генератора тактовых и управляющих импульсов, с выхода которого поступают импульсы на вторые входы АЦП а также на соответствующие входы других вспомогательных блоков. С помощью пульта управления, оператор может изменять исходные данные и алгоритм работы вычислительного устройства.
[12]Как было ранее сказано, вычислительное устройство выполнено с возможностью определения углового отклонения αi объектов заданного цвета по углу «рыскания» (αх) и углу «тангажа» (αу). Это осуществляется на основе выражения
[13]
[14]где С=С1⋅С2 - постоянная величина, определяемая допустимыми углами измерения возможного отклонения объекта по углам рыскания и тангажа и априорно известными параметрами ТВ камеры; ΔZx и ΔZy - число элементов и строк приходящее на угловое отклонение линии визирования объекта от оптической оси ТВ камеры по горизонтали и вертикали.
[15]При этом значение постоянной величины С1 находится согласно
[16]
[17]на основе известных табличных тригонометрических функций для функции tg αi при принятых значениях возможного отклонения по углу рыскания и тангажа, например, когда 1°≤αi≤20°, где значения Ci определяются зависимостью
[18]
[19]а значение постоянной величины С2 определяется на основе выражения
[20]
[21]где X1 - линейный размер рабочей поверхности МФП по горизонтали или вертикали; Z - число активных строк в ТВ кадре; F - фокусное расстояние объектива спектрозональной ТВ камеры.
[22]Подсчет числа элементов и строк, приходящих на угловое отклонение линии визирования объекта от оптической оси ТВ камеры по горизонтали и вертикали ΔZx и ΔZy можно осуществить различными способами [3, 4], например, путем выделения длительности сигналов, от центра МФП до объекта. При этом длительность ТВ сигналов изображения по горизонтали (строке) и вертикали (кадру) может быть представлена в виде определенного числа стробирующих импульсов заданной частоты
[23]
[24]Следует отметить, что наблюдаемые объекты в спектрозональных ТВ изображениях наделены некоторым множеством информационных признаков, включающих:
[25]спектрально-энергетические признаки (СЭП) объектов, которые отражают яркость, цветовой тон, насыщенность цвета, яркостную, цветовую и тепловую контрастность изображения и т.д.;
[26]пространственные признаки (ПП) объектов, которые отражают размер, форму, конфигурацию и др.;
[27]динамические и дополнительные признаки (ДП) объектов, отражающие координаты и их изменение во времени, скорость движения объекта и фона и т.д.
[28]При этом малая контрастность формируемых спектрозональных ТВ изображений, по своей природе может быть обусловлена различными причинами:
[29]слабой отражательной способностью объекта и фона;
[30]близкими между собой спектральными характеристиками объекта и фона;
[31]слабой освещенностью или излучательной способностью объекта и фона;
[32]плохой прозрачностью дистанционной среды и другими факторами.
[33]Из-за перечисленных факторов, которые могут влиять на качество формируемого изображения, недостатком рассмотренного патента [4] является то, что при увеличении дальности наблюдения до объектов, начинают теряться спектральные признаки (цвет) объектов, но их ПП будут еще сохраняться. Поэтому, в таких ситуациях, привлечение дополнительной информации по задаваемым ПП объектов, позволит определять угловое отклонение объекта по углу «рыскания» и углу «тангажа» в ТВ изображении.
[34]Технический результат - расширение функциональных возможностей по увеличению дальности обнаружения объектов заданного цвета за счет привлечения информации по их пространственным признакам, повышению точности определения углового положения объектов и осуществления их автосопровождения с формированием управляющих сигналов для электронного совмещения линии визирования изображения объекта с оптической осью ТВ камеры.
[35]Технический результат достигается тем, что в отличие от известного устройства для определения углового положения объектов заданного цвета, представляющем собой ТВ автомат, имеющий блоки и узлы, включающие спектрозональную ТВ камеру, аналого-цифровые преобразователи видеосигналов, для формирование на их выходах цифровых сигналов в n-разрядном параллельном двоичном коде, дешифраторами сигналов, объединенные в первую группу, и дешифраторы сигналов, объединенные во вторую групп, при этом выходы аналого-цифровых преобразователей видеосигналов соединены с соответствующими входами дешифраторов первой группы, выходы которых соединены со входами первого коммутатора сигналов заданного цвета, выходы которого соединены со входами вычислительного устройства, а также сумматор-коммутатор на входы которого подаются видеосигналы со спектрозональной ТВ камеры, а его три выхода соединены со входами цветного ВКУ, кроме того сигнал с вычислительного устройства поступает на вход знакогенератора, выход которого соединен с одним из входов сумматора-коммутатора, исполнительное устройство соединенное с выходами вычислительного устройства, которое выполнено с возможностью определения углового отклонения объектов заданного цвета по углу рыскания и углу тангажа, согласно полезной модели, дополнительно в него введены регулируемый блок формирования сигналов изображений типа «рамка» и «окошко», блок формирования сигналов изображений объектов заданных пространственных признаков, а также второй коммутатор сигналов изображений, причем первый выход блока формирования измерительных сигналов, имеющий на первом выходе сигнал изображения типа «рамка» соединен с сумматором-коммутатором, а второй его выход, имеющий сигнал изображения типа «окошко», соединен с одним из входов вычислительного через второй коммутатор сигналов изображений, кроме того один из выходов сумматора-коммутатора соединен с одним из входов вычислительного устройства, которое выполнено с возможностью определения также задаваемых пространственных признаков объектов, при этом один из выходов исполнительного устройства соединен с платформой, на которой установлена спектрозональная ТВ камера, которая под воздействием исполнительного устройства на платформу, может изменять свое положение по углу «рыскания» и углу «тангажа» для совмещения линии визирования изображения объекта и оптической оси ТВ камеры.
[36]В качестве сигнала изображения типа «рамка» для наведения его на изображения объекта селекции по экрану цветного ВКУ могут быть использованы и другие сигналы, например, типа «крест», «рамка + крест», «прерывистая рамка + крест» и т.д.
[37]Преимущество данного подхода, состоит в том, что сохраняется возможность определения углового отклонения объекта по углу «тангажа» и углу «рыскания» при увеличении дальности нахождения объектов в поле зрения спектрозональной ТВ камеры. Это достигается за счет привлечения дополнительной информации по пространственным признакам объектов селекции и участия оператора в формировании сигналов изображений типа «рамка» для выполнения операции селекции объекта с заданным цветом и пространственными признаками. Причем визуальное совмещение оператором центра изображения типа «рамка» с центром изображения объекта селекции предварительно повышает точностью определения углового отклонения объекта по углу «тангажа» и углу «рыскания» в вычислительном устройстве.
[38]На фиг. 1 показана проекция оптического изображения наблюдаемого пространства на рабочей поверхности матричного фотоприемника (МФП) спектрозональной телевизионной камеры.
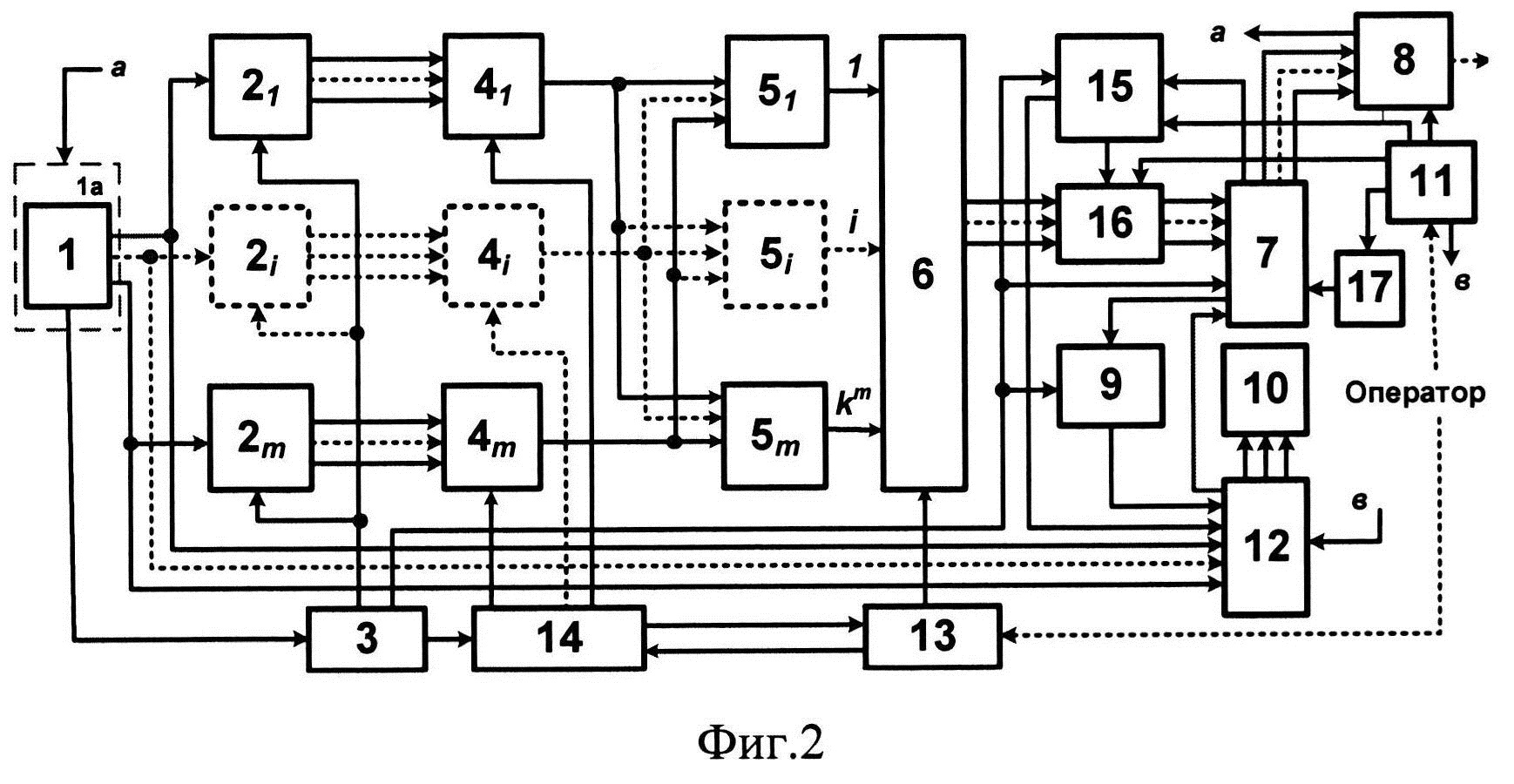
[39]На фиг. 2 представлена структурная схема устройства для определения углового положения объектов заданного цвета и пространственных признаков.
[40]На фиг. 3 показаны условные изображения объекта наблюдения и сигнала изображения типа «рамка» для двух случаев их расположения в поле зрения спектрозональной телевизионной камеры.
[42]1 - спектрозональная телевизионная камера;
[43]1а - платформа, на которой установлена спектрозональная телевизионная камера;
[44]2 - аналогово-цифровые преобразователи (АЦП);
[45]3 - местный генератор импульсов;
[46]4 - дешифраторы сигналов первой группы;
[47]5 - дешифраторы сигналов второй группы;
[48]6 - первый коммутатор сигналов объектов заданного цвета;
[49]7 - вычислительное устройство параметров объектов;
[50]8 - исполнительное устройство;
[52]10 - цветное видеоконтрольное устройство (ВКУ);
[53]11 - пульт управления;
[54]12 - сумматор-коммутатор сигналов;
[55]13 - панель управления;
[56]14 - блок установки амплитуды входных сигналов в каждом канале;
[57]15 - регулируемый блок формирования сигналов изображений типа «рамка» и «окошко»;
[58]16 - второй коммутатор сигналов изображений;
[59]17 - блок формирования сигналов изображений объектов заданных пространственных признаков.
[60]В устройстве для определения углового положения объектов произвольного цвета и пространственных признаков (фиг. 2), спектрозональная ТВ камера 1, осуществляет регистрацию лучистого потока отраженного от объектов в m-зонах спектрального участка от λ1 до λn, при этом m≥3. После преобразования лучистого потока осуществляется формирование m-спектрозональных сигналов изображений U1(t), …,Ui(t) …, Um(t), каждый из которых, с одной стороны, поступает на вход своего АЦП 21, …, 2i, …, 2m, а с другой стороны на информационные входы сумматора-коммутатора сигналов 12.
[61]При необходимости, в устройстве с помощью пульта управления 11, подается разрешающий сигнал на включение регулируемого блока формирования сигналов изображений типа «рамка» и «окошко» 15, сигнал с первого выхода которого, в виде изображения типа «окошко», через второй коммутатор сигналов 16 поступает на вычислительное устройство 7, а сигнал со второго его выхода в виде изображения типа «рамка» (фиг. 3) поступает на один из входов сумматора-коммутатора сигналов 12 и отображается на экране цветного ВКУ 10. Кроме того с пульта управления 11, через блок формирования сигналов изображений объектов заданных пространственных признаков 17 на один из входов вычислительного устройства 7 подается сигнал, определяющий задаваемые пространственные признаки объекта селекции с заданным цветом.
[62]Для объекта заданного цвета и пространственных признаков оператор наводит изображение типа «рамка» на изображение наблюдаемого объекта на экране цветного ВКУ. Это соответствует изображению типа «рамка» наведенного на изображение объекта селекции, как показано на фиг. 3 (вариант А). При этом центр изображения объекта селекции должен быть визуально совмещен с центром изображения типа «рамка» или, например, «крест».
[63]На экране цветного ВКУ линейный размер изображения типа «рамка» Lp выбирается, например, исходя из минимально возможного линейного размера изображения объекта селекции Lo по строке и кадру поля ТВ изображения. В этом случае, он должен удовлетворять условию
[64]
[65]Естественно, что в выражении (6) линейный размер изображения типа «рамка» и объекта селекции на экране цветного ВКУ может быть представлен числом элементов и строк приходящих на их изображения по горизонтали и вертикали с выделения длительности сигналов изображений, согласно (5).
[66]При увеличении линейного размера объекта селекции в процессе его наблюдения, увеличивается и линейный размер изображения типа «рамка» и «окошко» за счет воздействия формируемых управляющих сигналов с вычислительного устройства 7 на регулируемый блок формирования сигналов изображений типа «рамка» и «окошко» 15.
[67]Для автосопровождения объектов заданного цвета и пространственных признаков с сохранением их положения внутри изображения типа «рамка» в вычислительном устройстве вырабатывается управляющий сигнал перемещения, который воздействуя на регулируемый блок формирования сигналов изображений типа «рамка» и «окошко» изменяет их местоположение в ТВ растре по углу «рыскания» и углу «тангажа», если необходимо, изменяет и их размер, чтобы изображение объекта селекции всегда находилось в центре изображений типа «рамка».
[68]Роль сигнала изображения типа «окошко», заключается в том, что он поступая в вычислительное устройство дает разрешение на обработку сигнала только для той части ТВ изображения, где находится сигнал изображения типа «окошко» и соответственно сигнал изображения типа «рамка». Для достижения надежного изменения местоположения сигнала изображения типа «рамка» и «окошко» и точности слежения за объектом селекции, линейный размер сигнала изображений типа «окошко» Lок, который поступает на вход вычислительного устройства выбирается для обработки сигналов с некоторым запасом по строке и кадру ТВ изображения, а именно больше линейного изображения «рамка» не менее, чем на величину
[69]
[70]Далее, управляющий сигнал перемещения воздействует на регулируемый блок формирования сигналов изображений типа «рамка» и «окошко» в течении времени Δti до тех пор, пока не изменится их местоположение по углам «рыскания» и «тангажа» в ТВ растре и объект селекции не будет в центре изображения типа «рамка», а центр изображения типа «рамка» не будет совмещен с центром оптической оси спектрозональной ТВ камеры на экране цветного ВКУ (вариант В, фиг. 3).
[72]1. Барсуков Ф.И., Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов/ Под ред. А.И. Величкина. - М.: Сов. Радио, 1979. - 256 с.
[73]2. В.В. Коротаев, А.В. Краснящих. Телевизионные измерительные системы / Учебное пособие. - СПб: СПбГУ ИТМО, 2008. - 108 с.
[74]3. Сагдуллаев Ю.С., Ковин С.Д., Сагдуллаев Т.Ю., Смирнов А.И. Информационно-измерительные системы телевидения. - М.: "Спутник+", 2013. - 199 с.
[75]4. Патент РФ на полезную модель №151920. Устройство для определения углового положения объектов заданного цвета/ Вилкова Н.Н., Ковин С.Д., Сагдуллаев Ю.С., Рожков К.Ю. Опубл.20.04.2015 г.


{kind=link}