[1]Полезная модель относится к медицинской технике, а именно к протезам, в частности к протезам кисти. Она может быть использована для обеспечения трудовой деятельности лиц с ампутированными, на уровне предплечья, верхними конечностями, так как заявляемое устройство ориентировано на выполнение производственных операций.
[2]Трудоустройство инвалидов - одна из значимых задач в социальной сфере. Предлагаемая полезная модель расширяет возможности людей без кистей рук в области сложной производственной деятельности. По меньшей мере, они смогут заниматься ручным трудом на уровне ведения домашнего хозяйства и увлечений. При полномасштабном внедрении люди без кистей рук смогут осуществлять трудовую деятельность на существующих производствах либо организовывать индивидуальные предприятия по обслуживанию и ремонту приборов, офисной и бытовой техники, а также заниматься кустарным промыслом.
[3]Известен протез кисти [RU2423952, заявка от 21.12.2006]. Протез кисти содержит искусственную пясть и соединительные элементы для закрепления протеза на культе руки, а также, по меньшей мере, один шарнир для сгибания и разгибания протеза кисти относительно соединительных элементов. Пясть удерживается в нейтральном положении за счет усилия пружины. Пясти придан, по меньшей мере, один пружинящий элемент, имеющий прогрессивную характеристику и по мере увеличения угла сгибания или разгибания создающий возрастающее ответное усилие. Задачей данного изобретения является усовершенствование протеза кисти таким образом, чтобы он имел максимально естественный внешний вид.
[4]Показанный протез является косметическим, то есть рассчитанным на выполнение декоративных функций. В отличие от более функциональных активных протезов, устройство не позволяет пользователю производить какие-либо манипуляции, связанные с выполнением производственных операций, с учетом сопутствующих требований к усилию и точности.
[5]В качестве ближайшего аналога выбрана электромеханическая кисть [RU2663941, заявка от 14.02.2017]. Электромеханический протез кисти для протезирования руки на уровне предплечья содержит корпус, приемную гильзу, каркасы первого, второго, третьего, четвертого пальцев и пятый палец, выполненный в виде упругого звена, и механизм движения кисти с микроэлектроприводами. Каркас первого пальца закреплен на первой оси вращения, каркас третьего пальца и каркас четвертого пальца закреплены на второй оси вращения. Первая ось вращения и вторая ось вращения крепятся неподвижно в корпусе. Каркас второго пальца закреплен в каркасе третьего пальца при помощи третьей оси вращения. Каркас четвертого пальца и пятый палец выполнены в виде единого блока, в котором облицовка каркаса четвертого пальца выполнена за одно целое с облицовкой пятого пальца. Механизм движения кисти выполнен в виде механизма схвата, механизма отведения и механизма ротации. Механизм схвата выполнен в виде первого микроэлектропривода, снабженного микроконтроллером механизма схвата и исполнительным органом механизма схвата первого, второго и третьего каркасов пальцев. Первый микроэлектропривод и микроконтроллер механизма схвата расположены в корпусе механизма схвата, при этом корпус механизма схвата жестко крепится в корпусе. Механизм отведения выполнен в виде второго микроэлектропривода, закрепленного на каркасе третьего пальца и снабженного микроконтроллером механизма отведения и исполнительным органом механизма отведения второго от третьего каркаса пальцев. Микроконтроллер механизма отведения расположен на корпусе механизма схвата, а механизм ротации выполнен в виде третьего микроэлектропривода, снабженного микроконтроллером механизма ротации и исполнительным органом механизма ротации кисти. Третий микроэлектропривод и микроконтроллер механизма ротации закреплены внутри корпуса механизма ротации. Приемная гильза закреплена на корпусе механизма ротации, причем корпус механизма ротации жестко прикреплен к корпусу. Все три микроэлектропривода связаны с электронным средством управления кистью, закрепленным на блоке автономного питания, размещенном на корпусе механизма ротации и снабженном устройством управления блоком автономного питания. На приемной гильзе установлены электроды съема сигнала мышечной активности, связанные с электронным средством управления кистью, которое связано с микроконтроллером механизма схвата, микроконтроллером механизма отведения и микроконтроллером механизма ротации.
[6]При выполнении производственных операций с использованием электромеханической кисти, описанной в RU2663941, перемещение инструмента, зажатого в схвате, осуществляется, как правило, только за счет движения предплечьем. Перемещение инструмента с использованием только механизма ротации (без сопутствующего движения предплечьем) мало пригодно для осуществления точного позиционирования инструмента в любой необходимой точке пространства. Это усложняет выполнение манипуляций, связанных с повышенными требованиями к точности, так как у данного протеза, в отличие от живой кисти, отсутствует возможность изменения положения инструмента при помощи движения пальцев. Кроме того, схват искусственными пальцами плохо приспособлен для удержания рабочего инструмента. Таким образом, недостатком ближайшего аналога является непригодность протеза для выполнения производственных операций, требующих высокой точности позиционирования инструмента.
[7]Технической проблемой, на решение которой направлена предлагаемая полезная модель, является усовершенствование электромеханического протеза кисти с целью увеличения точности позиционирования инструмента, удерживаемого схватом протеза.
[8]Решение технической проблемы достигается за счет того, что электромеханический протез кисти для протезирования руки на уровне предплечья, содержащий приемную гильзу, искусственную пясть и схват, а также датчик сигнала мышечной активности, микроэлектродвигатели, электронное средство управления протезом и источник питания, снабжен опорно-позиционирующим устройством для обеспечения установки протеза на поверхности неподвижного твердого объекта, выполненным с возможностью изменения высоты установки протеза и фиксации протеза в этом положении, при этом приемная гильза, искусственная пясть и схват соединены в единую жестко связанную конструкцию при помощи разъемных подвижных и неподвижных соединений, а механизм опорно-позиционирующего устройства связан с этой конструкцией при помощи упругих элементов, деформация которых позволяет схвату двигаться относительно положения опорно-позиционирующего устройства. Механизм опорно-позиционирующего устройства содержит тормозной механизм и четыре ножки, закрепленных с обеспечением возможности поворота одним концом на общей оси основания, при этом механизм опорно-позиционирующего устройства содержит упоры, выполненные с возможностью ограничения диапазона вращения ножек, каждая ножка выполнена с возможностью двигаться независимо от других, а тормозной механизм выполнен с возможностью фиксировать каждую ножку для предотвращения ее вращения. Тормозной механизм включает две рамки, соединенные с основанием, внутри каждой из которых попарно на общих осях размещены с обеспечением возможности вращения четыре кулачка, оси двух пар параллельны, при этом тормозной механизм содержит упругие прижимы, выполненные с возможностью прижима кулачков к ножкам, причем тормозной механизм содержит двигатель, выполненный с возможностью обеспечения размыкания кулачков и ножек и снабженный механизмом винт-гайка и тросами, каждый из которых закреплен одним концом на кулачке, а другим - на гайке. Механизм винт-гайка является механизмом винт-гайка с самоторможением, при этом корпус двигателя жестко зафиксирован на основании, а две рамки соединены с основанием при помощи двух стоек.
[9]Таким образом, за счет введения опорно-позиционирующего устройства в электромеханический протез кисти достигается технический результат - повышение точности позиционирования инструмента, управляемого при помощи протеза лицами с ампутированными на уровне предплечья верхними конечностями.
[10]На прилагаемых к описанию чертежах дано:
[11]- фиг. 1: 3D-вид протеза кисти;
[12]- фиг. 2: общий вид протеза кисти;
[13]- фиг. 3: разрез по линии А-А из фиг. 2;
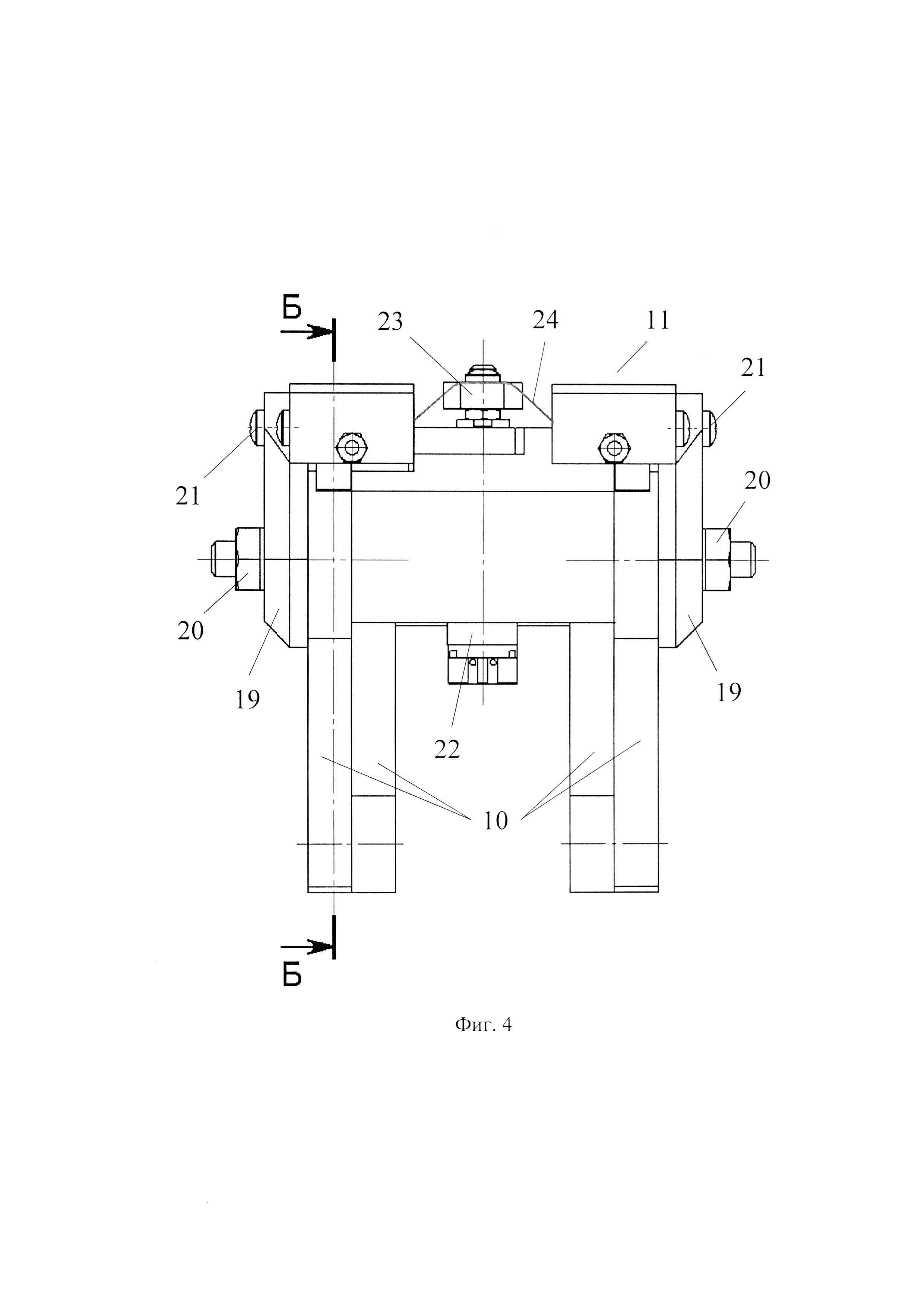
[14]- фиг. 4: опорно-позиционирующее устройство протеза кисти;
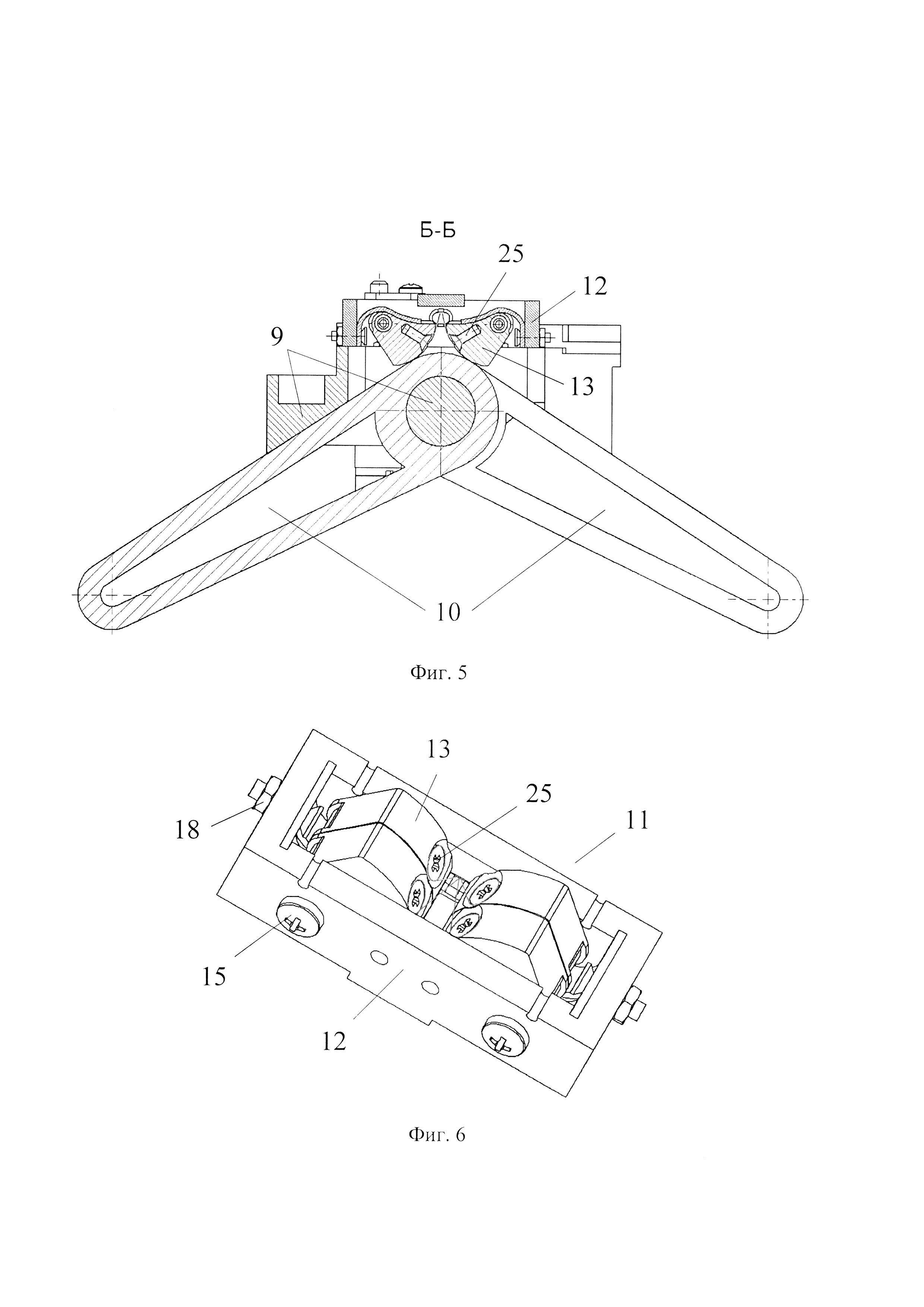
[15]- фиг. 5: разрез по линии Б-Б из фиг. 4;
[16]- фиг. 6: 3D-вид опорно-позиционирующего устройства;
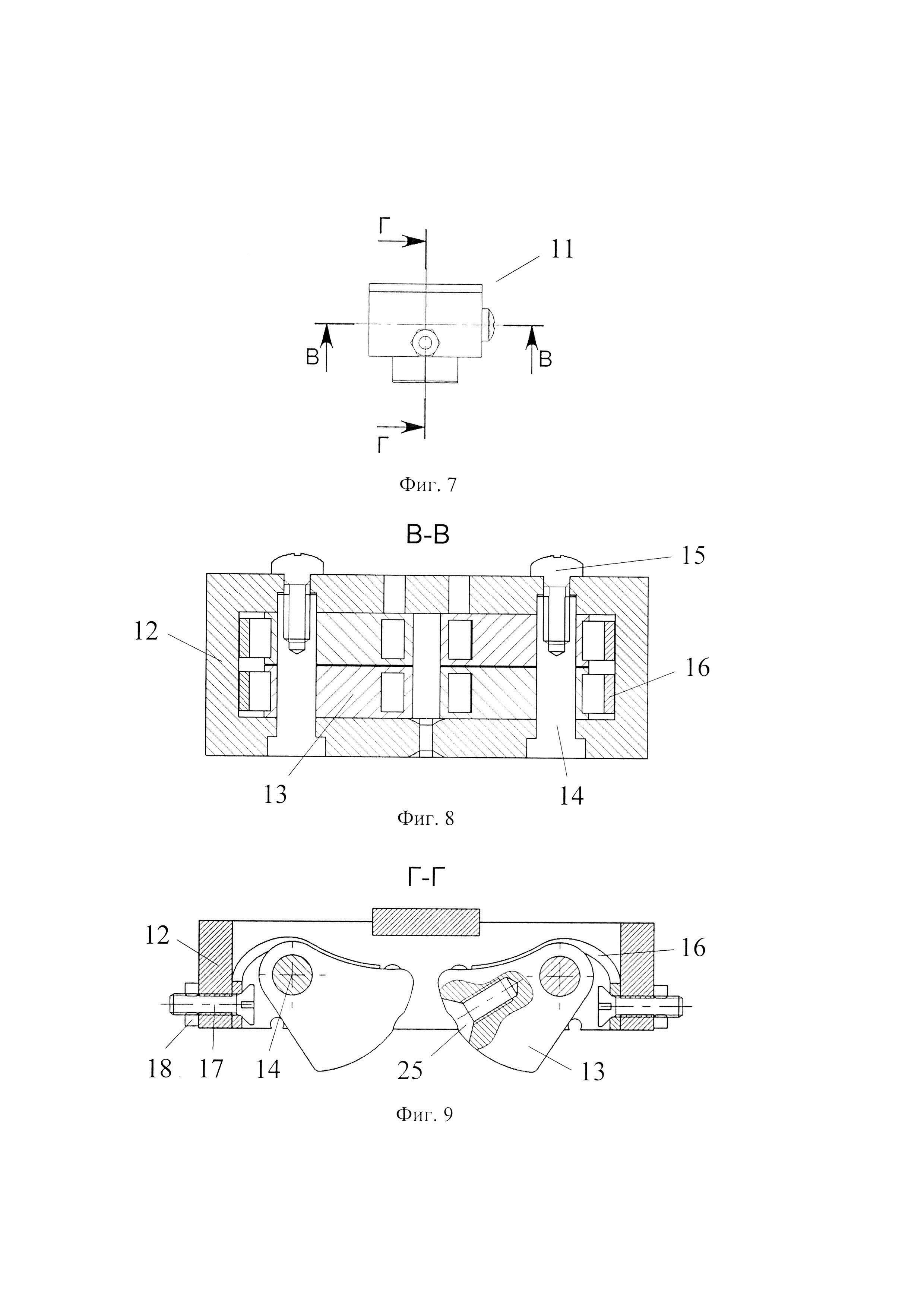
[17]- фиг. 7: узел тормозного механизма;
[18]- фиг. 8: разрез по линии В-В из фиг. 7;
[19]- фиг. 9: разрез по линии Г-Г из фиг. 7.
[20]Все детали электромеханического протеза кисти соединены между собой при помощи разъемных соединений (например, резьбовых, с использованием болтов, винтов или шпилек).
[21]Электромеханический протез кисти (фиг. 1) содержит последовательно соединенные между собой: приемную гильзу 1 (в дальнейшем - гильза), силомоментный датчик, формирующий сигналы мышечной активности для электронного средства управления, искусственную пясть 2 (в дальнейшем -пясть), второй силомоментный датчик, механизм быстровыполняемого соединения (байонет) и рабочий орган протеза, представленный в виде механизма схвата 3 (в дальнейшем - схват). Схват 3 обеспечивает возможность удержания инструмента 4. Байонет обеспечивает возможность быстрой замены одного схвата 3 другим (предназначенным для удержания другого инструмента 4).
[22]Пясть 2 заключена в разъемный корпус 5, состоящий из крышки 6 и днища 7 (фиг. 2), и содержит механизм опорно-позиционирующего устройства 8 (в дальнейшем - опора), расположенный в нижней ее части. Внутри корпуса 5 расположены детали каркаса, обеспечивающие жесткость конструкции и связывающие ее воедино. Гильза 1, корпус 5, детали каркаса, силомоментные датчики, байонет и схват 3 образуют единую жестко связанную конструкцию, при этом опора 8 связана с перечисленными деталями при помощи упругих элементов. Таким образом, обеспечивается возможность движения схвата 3 относительно опоры 8.
[23]Пясть 2 содержит механизм управления схватом. Он включает три микроэлектродвигателя, совмещенных с механизмом винт-гайка, предназначенных для перемещения схвата 3 в трех плоскостях, при этом корпуса двигателей жестко связаны с механизмом опоры 8, а гайки, размещенные на валу двигателей (винты), воздействуют на упругие элементы, обеспечивая, как было сказано выше, возможность движения схвата 3 относительно опоры 8.
[24]Электромеханический протез кисти также содержит электронное средство управления протезом и источник питания. Эти элементы могут быть размещены как в гильзе 1, так и в пясти 2.
[25]Силомоментные датчики, механизм управления схватом, электронное средство управления и источник питания не важны для понимания сути заявки, поэтому подробно в материалах не отражены.
[26]Опорно-позиционирующее устройство 8 предназначено для обеспечения устойчивой установки на поверхности неподвижного твердого объекта, расположенного вблизи зоны выполнения работ (например, на рабочем столе).
[27]Опора 8 должна позволять протезу точно фиксироваться в положении устойчивого равновесия на разной высоте над столом и при этом компенсировать некоторую неровность или негоризонтальность стола так, чтобы сам протез мог принять строго горизонтальное положение.
[28]Опора 8 должна иметь как минимум одну степень свободы (изменение высоты), однако возможно введение вращательной кинематической пары, позволяющей протезу, зафиксированному на неподвижной опоре 8, осуществлять поворот вокруг вертикальной оси.
[29]Введение в конструкцию протеза опорно-позиционирующего устройства 8 позволяет компенсировать вес протеза с зажатым в схвате 3 инструментом 4, тем самым облегчив нагрузку на мышцы руки при удержании протезом тяжелых устройств. Но основное предназначение опоры 8 в реализации способа, позволяющего увеличить точность позиционирования инструмента 4.
[30]При перемещении инструмента 4 заявляемым протезом, движение делится на начальный грубый и конечный точный этапы. На начальном этапе протез перемещают к месту работы за счет движения культи. Для выполнения мелких, точных операций, протез, при помощи опоры 8, фиксируют на поверхности неподвижного устойчивого объекта, после чего осуществляют конечный этап - выполнение точных движений инструментом 4.
[31]Заявляемый протез в значительной степени воспроизводит биомеханику микромоторных функций человека. Культя и сам протез образуют кинематически замкнутую шарнирно-рычажную конструкцию. Микроперемещения инструмента 4 осуществляют деформацией этой конструкции, где управление движением схвата 3, осуществляют за счет перераспределения напряжения между различными группами мышц культи. При этом инструмент 4 перемещается относительно неподвижной опоры 8 с тремя степенями свободы (фиг. 1).
[32]Конкретная конструктивная реализация опорно-позиционирующего устройства 8 может быть разнообразной, оно может содержать разное число опорных элементов (в дальнейшем - ножек). Ножки могут иметь фиксированный размер или конструкцию, позволяющую его менять (например, быть телескопическими). Концы ножек, примыкающие к поверхности стола, при необходимости могут быть обрезинены или выполнены иным образом, препятствующим легкому скольжению.
[33]В качестве примера рассмотрим подробнее один из возможных вариантов исполнения опорно-позиционирующего устройства 8.
[34]Опора 8 смонтирована на основании 9, расположенном внутри корпуса 5 пясти 2 и содержит четыре ножки 10, закрепленных одним концом на общей оси основания 9 с обеспечением возможности поворота (фиг. 3). Ножки 10 могут двигаться независимо друг от друга, фиксируясь в необходимом положении при помощи тормозного механизма. Таким образом, опора 8 адаптируется к неровной или негоризонтальной поверхности объекта, на который устанавливается. Ножки 10 проходят через прорези в днище 7, их движение ограничивается упорами, выполненными в нем (фиг. 2). Упоры не позволяют ножкам 10 занимать строго вертикальное положение - они всегда немного раздвинуты, как показано на фиг. 2.
[35]Тормозной механизм включает два одинаковых узла 11 (фиг. 6), каждый из которых содержит рамку 12 и четыре кулачка 13, размещенных внутри рамки 12 попарно на общих осях 14, с обеспечением возможности поворота вокруг этих осей (фиг. 8). Оси 14 параллельны друг другу и фиксируются в рамке 12 при помощи винтов 15. Узел 11 включает четыре прижима 16, закрепленных в рамке 12 при помощи винтов 17 и гаек 18. Форма деталей (рамки 12, осей 14 и прижимов 16) исключает возможность вращения осей 14 и прижимов 16 относительно рамки 12. Прижимы изготавливаются из упругого материала, например, пружинной стали и обеспечивают постоянный контакт кулачков 13 с ножками 10.
[36]Узлы 11 закреплены на основании 9 при помощи стоек 19. Стойки 19 крепятся к основанию 9 гайками 20 (фиг. 3), при этом форма деталей исключает возможность вращения стоек 19 относительно оси основания 9. Узлы 11, в свою очередь, крепятся к стойкам 19 при помощи винтов 21.
[37]Управление кулачками, выполняющими функцию тормозных колодок, осуществляется при помощи микроэлектродвигателя 22 (в дальнейшем -двигатель), закрепленного на основании 9 при помощи резьбового соединения и снабженного механизмом «винт-гайка». Прижимы 16 прижимают кулачки 13 к ножкам 10, осуществляя их фиксацию в необходимом положении. При необходимости разблокировки ножек, двигатель 22 поднимает гайку 23 (фиг. 4), установленную на валу двигателя 22 с обеспечением возможности перемещения вдоль его оси, но без возможности вращения (передача винт-гайка с самоторможением). Гайка 23, в свою очередь, натягивает закрепленные на ней тросы 24, проходящие через рамку 12 и прикрепленные другим концом - к кулачкам 13 при помощи винтов 25 (фиг. 5, 6). При этом кулачки 13 приподнимаются, освобождая ножки 10.
[38]Таким образом, каждая ножка 10 имеет собственный тормоз, включающий пару кулачков 13, размещенных в рамке 12 на параллельных осях 14 друг напротив друга. Геометрия кулачков 13 обеспечивает заклинивание, предотвращающее вращение ножек 10 в любую сторону.
[39]Для обеспечения трудовой деятельности оператор (инвалид) с надетым на культю протезом перемещает его к месту работы (начальный грубый этап), по прибытии на которое фиксирует протез на рабочем столе при помощи опоры 8.
[40]Перед фиксацией протеза необходимо осуществить его позиционирование в необходимом для работы положении. Для разблокировки ножек 10 (если до этого они были заблокированы), оператор приводит в действие двигатель 22 (управляющий сигнал можно передать разным способом - при помощи голосовой команды, нажатием клавиши на панели управления и т.п.). Вращение вала двигателя 22 заставляет гайку 23 двигаться вдоль оси вала вверх, натягивая тросы 24, которые в свою очередь преодолевают сопротивление упругих прижимов 16 и отодвигают кулачки 13 от ножек 10, размыкая их контакт.
[41]Оператор опускает протез со свободно свисающими ножками 10 к поверхности стола до касания ножек 10 с ним. При дальнейшем движении протеза вниз, ножки 10 скользят по поверхности стола, разъезжаясь в стороны. Тормозной механизм позволяет каждой ножке 10 занимать собственное положение (стоять под своим углом).
[42]Для фиксации ножек 10 (срабатывания тормозного механизма) приводится во вращение в обратном направлении вал двигателя 22. Это позволяет гайке 23 опуститься, натяжение тросов 24 ослабляется и кулачки 13 прижимаются к ножкам 10 прижимами 16. Таким образом, все четыре ножки 10 фиксируются в необходимом положении.
[43]При необходимости перемещения протеза в другое положение (например, для размещения инструмента 4 на другой высоте), ножки 10 могут быть разблокированы и заблокированы снова в новом положении, как это было описано выше.
[44]После выполнения начального этапа движения, осуществляют конечный этап - точное позиционирование инструмента 4 за счет движения схвата 3 относительно неподвижной опоры 8.
[45]Приведем пример, когда в качестве инструмента 4 используется электрическая аккумуляторная отвертка. Рукоятка отвертки зажимается схватом 3. Оператор на начальном этапе располагает протез так, чтобы наконечник отвертки был как можно ближе к шляпке винта. После фиксации протеза в необходимом положении, оператор осуществляет конечный точный этап - движение наконечника отвертки до полного соприкосновения со шлицом винта и вращение винта в необходимую сторону.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}