[1]Полезная модель относится к области исследования качества материалов с помощью ультразвуковых волн, а именно к области неразрушающего контроля, и может быть использована для ультразвукового контроля различных объектов.
[2]Важнейшим условием проведения неразрушающего контроля является обеспечение акустического контакта ультразвукового преобразователя с контролируемым объектом, для чего применяют различные контактные жидкости. Плотность и другие физические свойства контактной жидкости должны обеспечивать равномерность и однородность, отсутствие в нем газовых включений, образующихся при выталкивании воздуха из заполняемой емкости контактной жидкостью, при незначительном контрасте температур контактной жидкости, подаваемой извне в емкость. По законам физики, в любой воде содержатся газы (кислород, водород, азот и иные) и при нагревании (даже незначительном, возникшем на контрасте температур) происходит их расширение, таким образом, возникают воздушные пузырьки, закрепляющиеся на поверхностях емкости и преобразователя. Такие газовые (воздушные) включения являются препятствием для высокочастотных ультразвуковых волн и ведут к получению ложных сигналов измерений из-за переотражений волн.
[3]Иммерсионный метод контроля из-за постоянной подачи контактной жидкости в зону контроля очень подвержен образованию газовых (воздушных) включений в жидкости за счет постоянного давления, создающего бурление поступающей жидкости и оседанию на стенках емкости (иммерсионной ванны) и поверхности преобразователя воздушных пузырьков.
[4]Известно устройство для ультразвукового иммерсионного контроля (патент РФ №194527). Сущность полезной модели заключается в том, что устройство для ультразвукового иммерсионного контроля содержит корпус, блок датчиков, состоящий из восьми групп датчиков, каждая из которых содержит датчик толщины, датчик продольных дефектов и датчик поперечных дефектов. Датчики представляют собой ультразвуковые преобразователи. Датчик толщины установлен вертикально и перпендикулярно к поверхности трубы. Датчики продольных и поперечных дефектов соответственно установлены под углом к поверхности трубы. Датчик продольных дефектов расположен под углом к поверхности трубы в плоскости, перпендикулярной ее продольной оси, датчик поперечных дефектов расположен под углом к поверхности трубы и под углом к плоскости, перпендикулярной оси трубы. Датчики толщины продольных и поперечных дефектов установлены на основаниях, которые снабжены опорными подшипниками. Крайние основания шарнирно соединены с основанием датчика толщины и подпружинены пружиной относительно его с возможностью поворота в плоскости, перпендикулярной оси трубы. Основание датчика толщины снабжено направляющими, установленными с возможностью вертикального перемещения по пазам блока датчиков. Узел позиционирования блока датчиков выполнен в виде передних и задних кронштейнов с опорными колесами. На корпусе установлен также конечный выключатель для определения конца трубы и прекращения перемещения корпуса с блоком датчиков. Корпус соединен с кареткой, перемещающейся вместе с блоком датчиков вверх-вниз и вдоль трубы.
[5]Известно устройство для ультразвуковой дефектоскопии (патент РФ №2140629). Устройство содержит рольганг, акустический блок и иммерсионную ванну. Ультразвуковые датчики акустического блока помещены в иммерсионную жидкость ванны. Также в иммерсионную жидкость ванны помещена часть рольганга таким образом, что в зоне ванны профиль рольганга образует прогнутую кривую, симметричную относительно акустического блока, причем форма кривой выбрана из условия ее совпадения с формой упругой линии контролируемого листа при его движении по рольгангу. Часть акустического блока, в которой расположены ультразвуковые датчики, может быть помещена в водоподъемную камеру. Ее внутреннее пространство ограничено стенками, а дном является жидкость иммерсионной ванны. Внутреннее пространство водоподъемной камеры соединено через воздухозаборный трубопровод с устройством откачки воздуха.
[6]Ближайшим по технической сущности является устройство для иммерсионного ультразвукового контроля (патент РФ №2723913). Сущность изобретения заключается в том, что устройство для иммерсионного ультразвукового контроля содержит иммерсионную или локально-иммерсионную ванну, и один или несколько иммерсионных ультразвуковых преобразователей, позиционированных относительно объекта контроля таким образом, что оптимальный угол падения продольной волны на поверхность объекта контроля соответствует определенному условию.
[7]Недостатком всех выявленных аналогов является отсутствие мер по удалению воздушных пузырьков, оседающих в процессе осуществления иммерсионного метода контроля на поверхности ультразвукового преобразователя, и приводящих к появлению ложных сигналов из-за переотражений волн. Наличие указанных переотражений понижает достоверность контроля.
[8]Задачей предлагаемого технического решения является исключение влияния воздушных пузырьков, оседающих на поверхности ультразвукового преобразователя при осуществлении иммерсионного метода контроля, на результаты контроля, что обеспечит получение технического результата - повышение достоверности контроля.
[9]Технический результат достигается тем, что устройство включает в себя иммерсионную ванну, по меньшей мере один иммерсионный ультразвуковой преобразователь, причем на кромке ванны содержится рамка, на которой размещены указанные ультразвуковые преобразователи, жестко закрепленные на ней, и каретка, выполненная с возможностью передвижения вдоль кромки ванны с помощью линейного привода, жестко закрепленного на рамке, и содержащая твердотельный поводок, такой, что он имеет форму, обеспечивающую прижим размещенного на нем элемента из эластичного материала к рабочей поверхности преобразователей, причем линейный привод размещен параллельно преобразователям по всей их длине, а ширина элемента из эластичного материала равна или превышает ширину поверхностей преобразователей.
[10]Совокупность признаков обеспечивает возможность механической отчистки поверхности ультразвукового преобразователя от осевших на ней пузырьков воздуха с помощью элемента из эластичного материала, например, из резины, каучука и т.п., обтирающего поверхность, движение которого вдоль поверхностей преобразователей осуществляется с помощью системы из привода, каретки и поводка. Элемент должен обтирать всю рабочую поверхность преобразователя, в противном случае на ее частях будут оставаться пузырьки и создавать ложные сигналы, то есть технический результат не будет достигнут.
[11]Совокупность признаков по пункту 2 характеризует устройство, в котором линейный привод выполнен в виде пневмоцилиндра. Реализация с использованием пневмоцилиндра обеспечивает простоту, надежность, экономичность и безопасность конструкции.
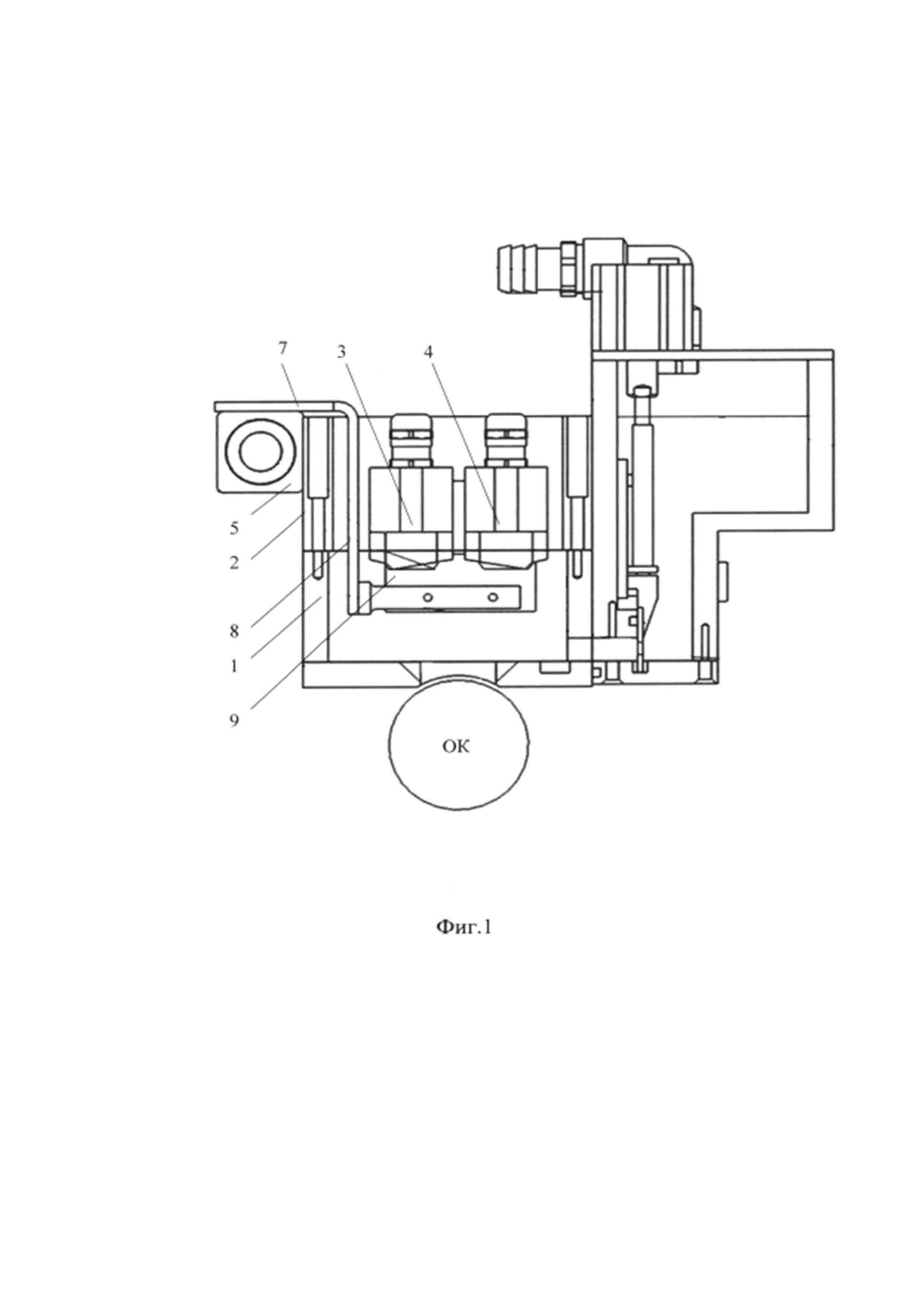
[12]Сущность полезной модели поясняется на примере устройства с двумя ультразвуковыми преобразователями и иммерсионной ванной для контроля труб чертежами, где устройство показано на фиг. 1, на фиг. 2 - общий вид, фиг. 3 - вид спереди.
[14]1 - иммерсионная ванна
[16]3, 4 - ультразвуковые преобразователи
[17]5 - линейный привод, пневмоцилиндр с соплами подвода воздуха 6
[20]9 - элемент из эластичного материала
[21]На кромке иммерсионной ванны 1 размещена рамка 2. В рассматриваемой реализации иммерсионная ванна 1 имеет отверстие в ее дне, приспособленное для прижима к объекту контроля, и содержит ультразвуковые преобразователи 3 и 4, тем самым реализуя локально-иммерсионный способ контроля. Ультразвуковые преобразователи 3 и 4 закреплены внутри рамки 2. К рамке 2 прикреплен линейный привод 5 (например, бесштоковый пневмоцилиндр) с кареткой 7, поводком 8 и элементом 9 из эластично материала на нем. Линейный привод 5 размещен параллельно ультразвуковым преобразователям 3 и 4. Подача воды в иммерсионную ванну осуществляется из примыкающей к ней камеры по каналу в нижней части ванны.
[22]Для осуществления неразрушающего контроля с применением приведенной реализации иммерсионную ванну 1 прижимают ее отверстием к объекту контроля и заполняют водой. В случае использования не локально-иммерсионного способа, объект контроля помещают внутрь ванны и аналогично заполняют ее водой. В процессе проведения измерений ультразвуковыми преобразователями 3 и 4 периодически приводят в движение каретку 7 линейным приводом 5, в данном случае пневмоцилиндром, движущая воздушная масса в который подается через сопла 6. Твердотельный поводок 8, закрепленный на каретке 7, имеет форму, обеспечивающую прижим элемента 9 из эластичного материала к рабочей поверхности преобразователей 3 и 4. При движении каретки 7 элемент 9 проходит по поверхностям ультразвуковых преобразователей 3 и 4 по всей их длине и удаляет с них осевшие воздушные пузыри. Периодичность приведения в движение каретки 7 приводом 5 определяется оператором в процессе контроля исходя из необходимости (на основании наблюдений за А-сканом и наличия паразитирующих сигналов и акустических шумов при контроле, образующихся из-за оседания воздушных пузырьков). Размер элемента 9 обеспечивает очистку всей поверхности за одно движение каретки вдоль ультразвуковых преобразователей 3 и 4 по всей их длине за счет того, что ширина элемента 9 из эластичного материала равна или превышает ширину поверхностей ультразвуковых преобразователей 3 и 4.
[23]Устройство для неразрушающего контроля приведенной конструкции реализовано заявителем для осуществления контроля различных объектов, в том числе рельса, круглого и квадратного сортового проката. Применение конструкции устройства с очисткой рабочих поверхностей ультразвуковых преобразователей во время неразрушающего контроля существенно повысило достоверность контроля и подтвердило наличие указанного технического результата.


{kind=link}
{kind=link}